

随着暑假临近,人们开始忙碌于打包行李,这一看似简单的任务对机器人而言却极具挑战。近日,麻省理工学院(MIT)和NVIDIA研究院的研究人员共同开发了一种新颖算法,旨在显著加快机器人的规划过程,使其能够更高效地完成复杂任务。
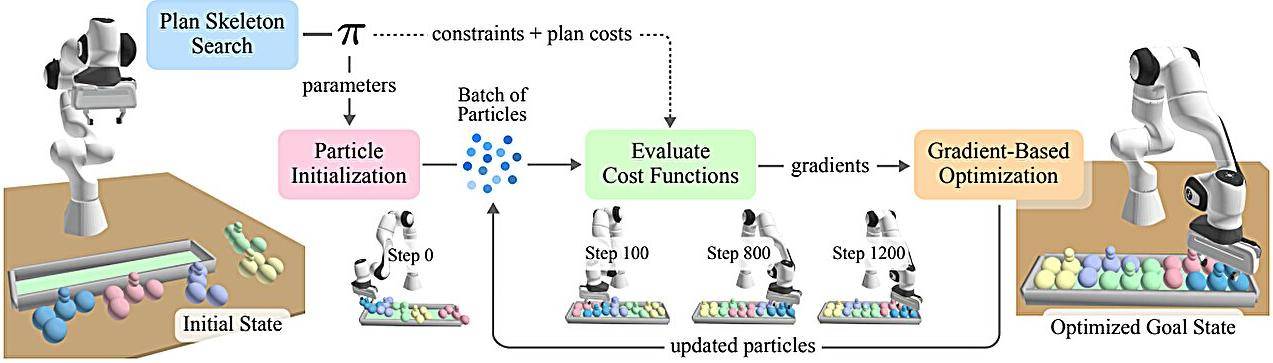
该算法名为cuTAMP,通过并行评估数千种可能的解决方案,并根据机器人及其环境的限制条件对最佳方案进行改进,从而大幅缩短了机器人的规划时间。与许多现有方法不同,cuTAMP不是一次测试一个潜在动作,而是同时考虑数千个动作,在几秒钟内解决多步骤操作问题。
研究人员利用图形处理单元(GPU)的强大计算能力,实现了算法的加速。在工厂或仓库等实际应用场景中,cuTAMP技术使机器人能够快速确定如何操作和紧密包装具有不同形状和大小的物品,而不会损坏它们,也不会撞倒任何东西或与障碍物碰撞。
“这在工业环境中非常有用,因为时间至关重要,你需要尽快找到有效的解决方案。”麻省理工学院研究生William Shen表示,他是这项技术论文的主要作者。cuTAMP算法通过结合采样和优化两种技术,广泛探索潜在解决方案,同时缩小采样空间,确保在优化过程中更快地找到解决方案。
在模拟测试中,cuTAMP算法在处理类似俄罗斯方块的包装挑战时,仅用几秒钟就找到了成功的、无碰撞的计划。当部署在真正的机械臂上时,该算法也总能在30秒内找到解决方案。该系统适用于各种机器人,并已在麻省理工学院的机械臂和NVIDIA的人形机器人上进行测试。
更多信息: William Shen 等人,可微分 GPU 并行任务与运动规划,arXiv (2024)。期刊信息: arXiv