

近日,研究人员推出了一款名为F-TAC Hand的机械手,该机械手集成了高分辨率触觉感知技术,覆盖了高达70%的表面积,可实现类似人类的自适应抓取。这一成果发表于《自然机器智能》期刊,标志着机器人智能及其与动态现实环境交互能力的显著提升。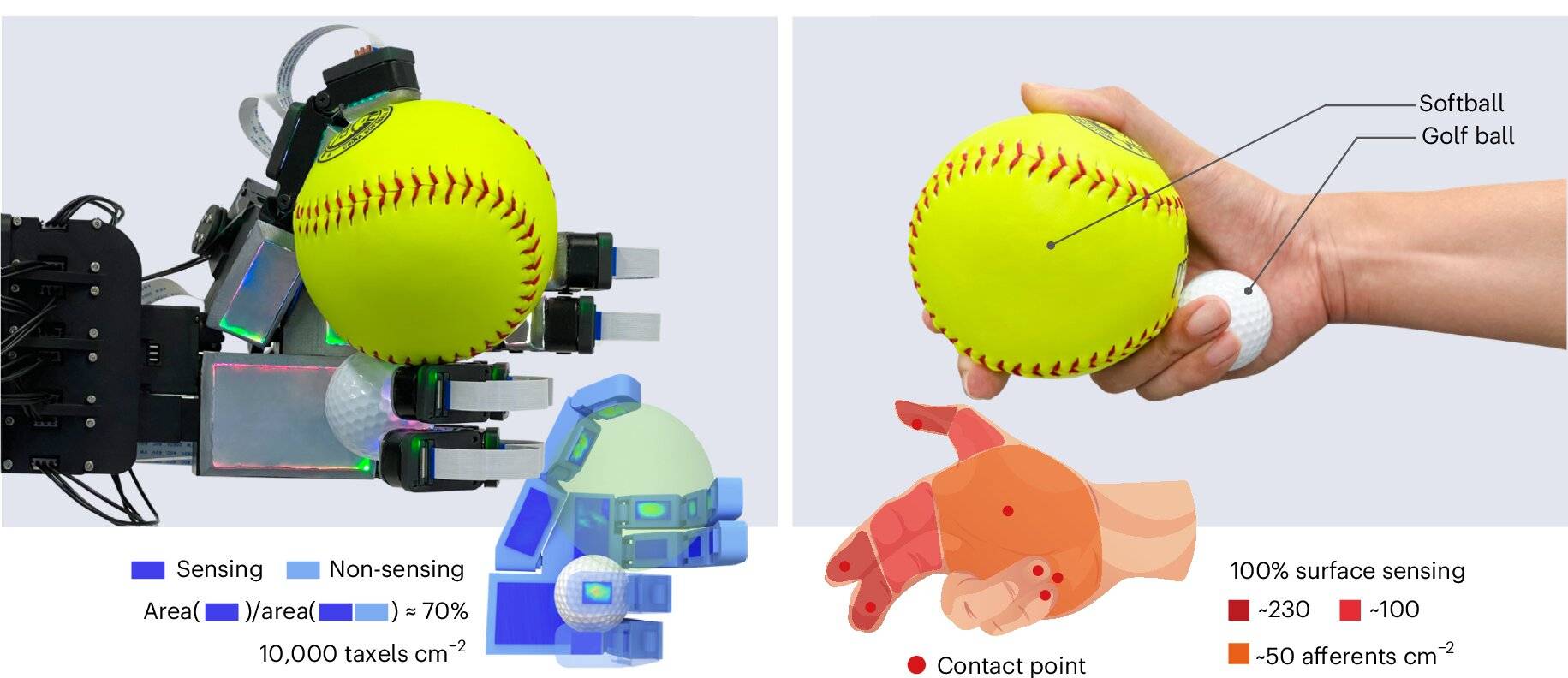 长期以来,机器人系统在模仿人类手部运动学和控制算法方面取得了显著进展,但在动态环境中仍难以匹敌人类的能力,这主要归因于触觉反馈的不足。F-TAC Hand机械手凭借其触觉传感器高达0.1毫米的空间分辨率,成功解决了这一难题。伦敦玛丽女王大学先进机器人卓越中心主任卡斯帕·阿尔特霍费尔教授对此给予高度评价:“如此高的空间分辨率与巨大的覆盖范围相结合,确实是前所未有的创新。”
长期以来,机器人系统在模仿人类手部运动学和控制算法方面取得了显著进展,但在动态环境中仍难以匹敌人类的能力,这主要归因于触觉反馈的不足。F-TAC Hand机械手凭借其触觉传感器高达0.1毫米的空间分辨率,成功解决了这一难题。伦敦玛丽女王大学先进机器人卓越中心主任卡斯帕·阿尔特霍费尔教授对此给予高度评价:“如此高的空间分辨率与巨大的覆盖范围相结合,确实是前所未有的创新。”
F-TAC Hand机械手的创新设计不仅克服了集成高分辨率触觉传感器的传统挑战,还充分保留了机械手的运动范围。结合能够合成类人手结构的生成算法,该机械手在动态真实环境中展现出了强大的抓取能力。经过600项真实世界试验的广泛评估,F-TAC Hand机械手在复杂操作任务中的表现显著优于非触觉感知系统,为丰富的触觉感知在开发高级机器人智能中的关键作用提供了实证证据。
阿尔特霍费尔教授强调,这项研究将带来更佳的物体操控能力,从而开辟更多应用领域,如制造、人机交互和辅助技术。他提到,创造能够协助人类完成日常任务的机器人,包括配备机械手的人形机器人,具有巨大的潜力。
这一发展标志着人类与机器人灵活性差距的缩小迈出了重要一步。未来,机器人有望以前所未有的细微差别和适应性与周围环境进行互动,为人类生活带来更多便利。
更多信息: Zihang Zhao 等,《在机器人手中嵌入高分辨率触觉,实现类似人类的自适应抓取》,《自然机器智能》(2025)。期刊信息: 《自然机器智能》