

扩散模型,这一在图像生成与设计领域崭露头角的技术,正逐步拓展其应用边界,近期在机器人设计领域也取得了显著进展。生成式人工智能(GenAI)模型已能自主或基于用户输入,从零开始设计机器人结构及其控制系统,并在制造前进行模拟评估。麻省理工学院计算机科学与人工智能实验室(CSAIL)更是将这一技术推向新高度,开发出一种新方法,将扩散模型应用于人类机器人设计的改进中。用户可绘制机器人3D模型,指定修改部件及尺寸,GenAI则集思广益,优化设计并在模拟环境中测试。找到合适设计后,可直接3D打印出可运行的机器人,无需额外调整。
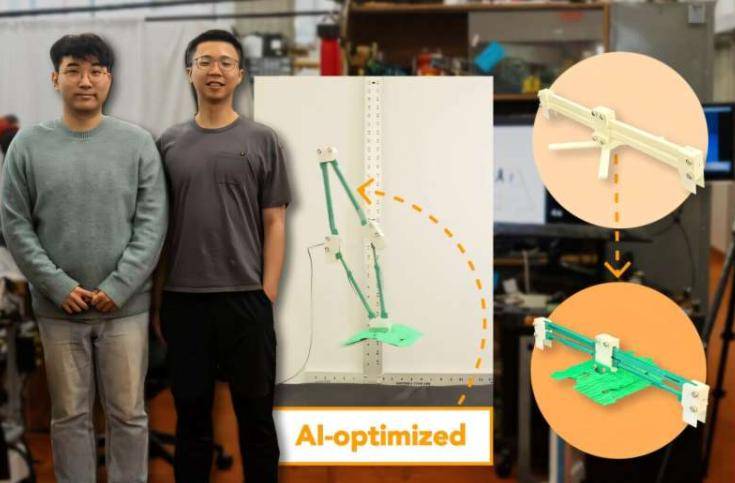
研究人员利用此方法制造的机器人,平均跳跃高度约2英尺,较同类机器人高出41%。其独特之处在于,人工智能生成的连杆呈弯曲状,类似粗鼓槌,而标准机器人连接部件为直矩形。为进一步提升性能,研究人员对500个潜在设计进行采样,根据模拟性能选出前12个选项,优化嵌入向量,重复五次后,最终设计形似球体,显著提高了跳跃能力。共同主要作者、CSAIL博士后Byungchul Kim表示,扩散模型的优势在于能找到非常规解决方案,如通过独特形状储存能量,同时避免链节过细易断的问题。
此外,团队还要求系统设计优化的脚部,确保安全落地。经重复优化,AI设计的机器跌倒次数远低于基准水平,提升了84%。扩散模型在提升机器人跳跃和着陆技能方面的表现,预示着其在其他机器设计领域的广阔前景。例如,制造或家用机器人公司可利用类似方法改进原型,节省工程师迭代时间。联合主要作者、麻省理工学院CSAIL博士生Tsun-Hsuan “Johnson” Wang表示,该项目是生成式人工智能助力新型机器人设计的起点,未来希望拓展到更灵活的目标,如用自然语言引导设计可拿起杯子或操作电钻的机器人。Kim还指出,扩散模型有望帮助生成关节,构思部件连接方式,进一步提高机器人性能。