

当生成式AI模型如ChatGPT为人们提供解答时,其背后依赖的是基于海量数据训练的基础模型。同样,工程师们希望为机器人构建这样的基础模型,让它们掌握新技能,然而,收集和传输机器人教学数据却充满挑战。麻省理工学院计算机科学与人工智能实验室(CSAIL)与机器人与人工智能研究所开发出“PhysicsGen”模拟驱动方法,可定制机器人训练数据,助力机器人高效完成任务。
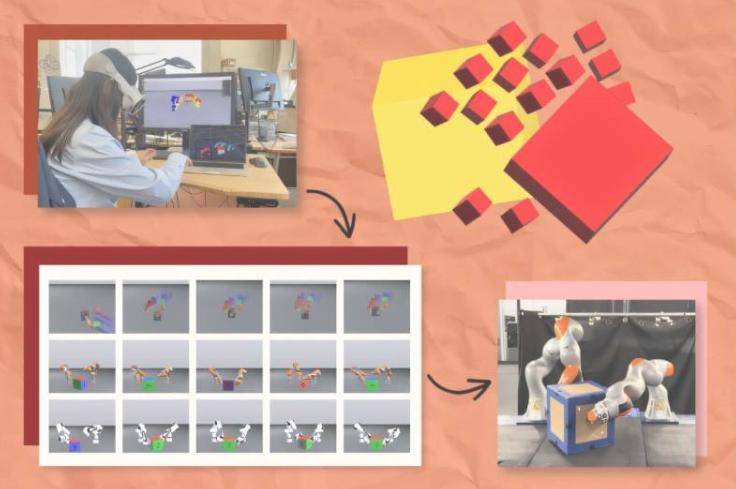
PhysicsGen通过三步流程创建适用于特定机器人的数据。首先,利用VR头显追踪人类操控物体的动作,并将这些交互映射到3D物理模拟器中。接着,将这些点重新映射到特定机器的3D模型上,并移动到精确“关节”。最后,PhysicsGen使用轨迹优化,模拟完成任务的最有效运动,使机器人掌握执行操作的最佳方法。每次模拟都成为详细训练数据点,引导机器人探索处理物体的多种方法。
“PhysicsGen无需人工为每台机器重新录制演示,而是以自主高效的方式扩展数据,”麻省理工学院电气工程与计算机科学博士生、该项目主要作者Lujie Yang表示。该系统能将少量人类演示转化为数千个模拟演示,显著提升机器人执行任务的准确率。实验中,数字机器人以81%的准确率执行了旋转块到目标位置的任务,比仅从人类演示中学习的基准提高了60%。PhysicsGen还能改进虚拟机械臂协作,帮助两对机器人成功完成任务,比纯人工训练的基准模型高出30%。
PhysicsGen的潜力不仅在于提升现有机器人性能,还能将老款机器人或不同环境设计的数据转化为适用于新机器的指令。未来,PhysicsGen可能扩展到使机器可执行任务多样化领域,创建一个多样化的物理交互库,帮助机器人完成全新任务。麻省理工学院研究人员正研究如何利用海量非结构化资源,如互联网视频,作为模拟种子,将日常视觉内容转化为机器人可用数据。
更多信息: Lujie Yang 等,《通过轨迹优化实现物理驱动的富接触操作数据生成》,arXiv (2025)。期刊信息: arXiv