

布法罗大学在机器人触觉感知领域取得重大突破,其研发的新型电子纺织品(E - textile)有望解决机器人缺乏良好触觉这一难题,相关研究成果于7月30日发表在《自然通讯》杂志上。
长期以来,许多机器人难以掌握掉落物品、控制抓握力度等人类基本技能,尽管科学家为机器人配备了摄像头等工具提升其感知能力,但简单且经济有效的解决方案一直未被找到。
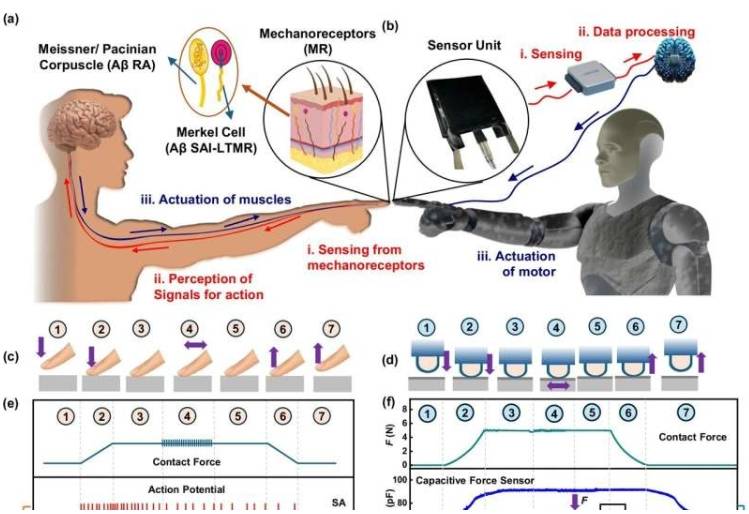
布法罗大学此次研发的新型电子纺织品,模拟了人类手部神经抓握物体时感知压力和滑动的方式。布法罗大学工程与应用科学学院机械与航空航天工程系助理教授刘俊博士(也是布法罗大学 RENEW 研究所核心教员、该研究通讯作者)介绍,这项技术可应用于产品组装和包装等制造任务,以及人类与机器人协作的各类场景,还能助力改进机器人手术工具和假肢。研究团队成员还包括布法罗大学机械与航空航天工程系副教授 Ehsan Esfahani 博士、多名布法罗大学学生及刘教授团队前博士生(现为芝加哥大学博士后学者)。
该研究第一作者、刘氏研究小组博士生瓦辛·高瑟姆表示,此传感器类似人类皮肤,灵活且高度灵敏,不仅能感知压力,还能感知物体的细微滑动和运动,这一突破可能改变机器人、假肢和人机交互系统与周围世界的互动方式。
研究人员将传感系统集成到一对 3D 打印的机器人手指上,这些手指安装在由 Esfahani 团队开发的柔性机器人夹持器上。Esfahani称,传感器集成后,机器人夹持器能检测滑动并动态调整柔顺性和夹持力,实现以前难以完成的手持操作任务,例如当从手指上拉铜重物时,抓手会感知并立即收紧抓握力。他还表示,该传感器是让机械手更接近人手功能的关键部件,其利用摩擦伏打效应,物体轻微移动产生的摩擦会产生直流电。
研究人员测量发现,该传感系统响应时间与人类相当,根据实验不同,响应时间在0.76毫秒到38毫秒之间,而人类触觉受体反应时间通常在1到50毫秒之间。刘俊教授称,系统速度惊人,符合人类表现设定的生物学基准,且滑动越剧烈或越快,传感器响应越强,这有利于构建控制算法,使机器人精确行动。
目前,研究团队计划对传感系统进行额外测试,包括整合强化学习人工智能,以进一步提高机器人灵活性。
更多信息: Vashin Gautham 等人,《滑动驱动仿生触觉传感系统与动态直流发电机集成电子纺织品,用于灵巧机器人操作》,《自然通讯》(2025 年)。