

浦项科技大学(POSTECH)研究团队受人类肌肉蛋白启发,成功开发出一种轻薄灵活的机器人执行器,相关研究发表于《自然通讯》杂志。
传统机器人多由刚性金属部件制成,虽具强度,但在执行精细动作和狭窄环境操作上能力受限。而此次研发的机器人执行器薄如纸张,却能产生强大力量,可在狭小空间内灵活移动并操控物体,适用于手术机器人、工业设备等多种场景。
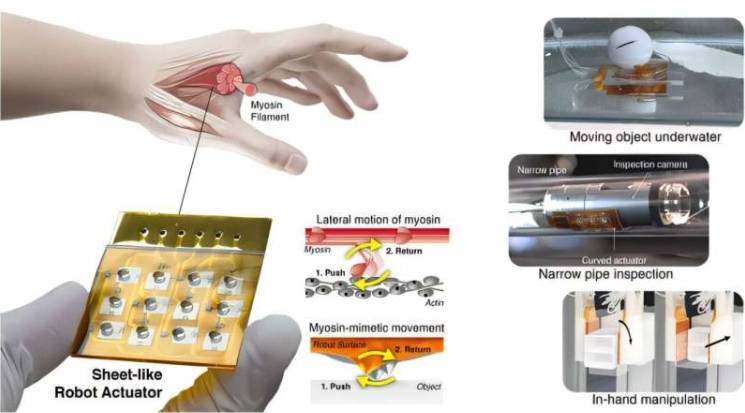
该团队由三星电子未来机器人部门的 Hyung Gon Shin 博士(前浦项科技大学博士研究员)以及浦项科技大学机械工程系的 Keehoon Kim 教授和 Wan Kyun Chung 教授组成。他们从人体肌肉运动中获取灵感,模仿肌球蛋白通过反复小幅度收缩产生大幅度运动的功能,开发出薄片状气动执行器。此执行器看似简单薄片,内部却包含数十个小气室和多层、多通道气路。当空气依次注入薄片,表面突起会向多个方向移动,积累微小力量产生更大运动,且弯曲时能像毛毛虫一样爬行,可向上下、左右和旋转六个方向移动,还能灵活控制速度和距离。
研究团队通过一系列实验验证了该技术性能。在物体操控测试中,机器人移动精度堪比人类手指,还成功完成水下物体移动任务,能完成清洁狭窄管道等传统机器人难以完成的任务。此外,团队还开发了数学模型预测机器人运动,为未来多样化设计和应用奠定基础。
这项研究有望为日常生活和工业领域带来创新变革。在医疗领域,机器人可通过微小开口导航,协助精准手术;在工业环境中,能在密闭空间内执行检查等任务;应用于家庭清洁和护理机器人时,还能以更精细、灵敏的方式与人类互动。
Keehoon Kim 教授表示,研究成功将复杂的三维气动网络整合到薄而灵活的结构中,通过仿生方法实现多向运动,希望该技术能应用于手术机器人、工业协作机器人和探索环境等各个领域。
更多信息: Hyung Gon Shin 等,《基于多层 3D 气动网络的柔性机器人皮肤执行器》,《自然通讯》(2025 年)。