

达特茅斯学院研究人员打造的模块化机器人正应用于户外场景。这些机器人由立方体状机器人块拼接而成,块由刚性杆和柔软有弹性的绳子组成,通过调节绳子张力使块变形并控制形状,可根据实际任务组装成最适合的结构。
“模块化机器人用途广泛,组合模块方式不同,能做的事就不同。”Guarini 25届毕业生Luyang Zhao说道,他与达特茅斯现实与机器人实验室、罗格斯大学和耶鲁大学的同事合作开发了这些机器人。
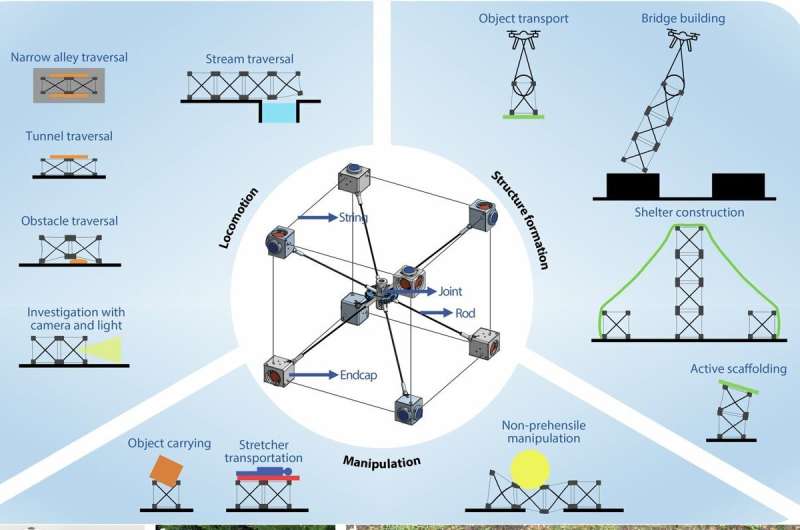
赵和瓜里尼大学计算机科学系研究生同学蒋一涛在校园附近对机器人模块进行测试。这些机器人在多种户外空间导航,能在倒下的原木下爬行、挤过狭窄空间,还联手搭建临时帐篷脚手架,在无人机协助下找到并“拯救”倒塌同伴。
研究人员受蚂蚁沿途连接填补空隙现象启发,展示了一排连接模块如何在狭窄小溪上架桥,甚至运送轻物体。赵和蒋用木板和短木块制作出可抬人体假人的担架,虽目前机器人无法支撑人体重量,但研究人员认为未来或可实现。
赵教授称,这些机器人重量轻、易部署、坚固耐用,可空投到任何地方并快速组装成桥梁或支撑临时避难所,在紧急救灾中能发挥有效作用。
研究人员在最近发表于《自然通讯》的论文中,描述了模块化机器人块的设计和功能。每个模块有八根从3D打印中心向外延伸的刚性杆,中心装有为机器人供电的电池和实现通信的Wi-Fi模块,一块积木充满电可“行走”三个多小时。杆末端是通过绳子连接的端盖,端盖上的电机可改变绳子长度、积木形状,还能激活端盖上的锁扣使积木相互连接。
计算机科学教授、研究首席研究员德文·巴尔科姆称,单个机器人细微变形能让整个系统产生大运动,组装单元将结构和运动巧妙结合。该团队利用无人机搭建3D结构改变了建筑格局,地面连接模块容易,但让它们相互攀爬搭建更高结构困难,无人机部署类似3D打印,可反复配置模块搭建高大结构。
最近加入克莱姆森大学任助理教授的赵教授表示,这是模块化机器人首次在户外环境展示如此丰富功能,但还有很多工作要做,如提高承重能力、添加传感器让机器人感知和响应环境以更自主。
更多信息:Luyang Zhao 等,《模块化变形张拉整体块实现自组装机器人结构》,《自然通讯》(2025)