

韩国中央大学化学工程系传来喜讯,由Suk Tai Chang教授和Changyeon Lee助理教授领衔的研究团队,在软体机器人领域取得重大突破,成功研发出创新的毛毛虫式软体机器人,相关研究成果于2025年7月30日在线发表于国际知名期刊《先进功能材料》杂志。
该研究的灵感源自自然界的毛毛虫,其高效的爬行运动引发了研究团队浓厚兴趣。传统软体机器人实现非对称弯曲运动需复杂加热配置,而此次研究旨在突破这一局限。
研究团队另辟蹊径,选用常见且环保的纤维素纸作为软体机器人基底,摒弃复杂电路设计,采用基于印刷的电极图案化技术,极大简化了制造工艺。李教授表示,纤维素基纸基材的多孔结构,利于通过溶液工艺轻松进行电极沉积,且具备出色的机械变形能力。
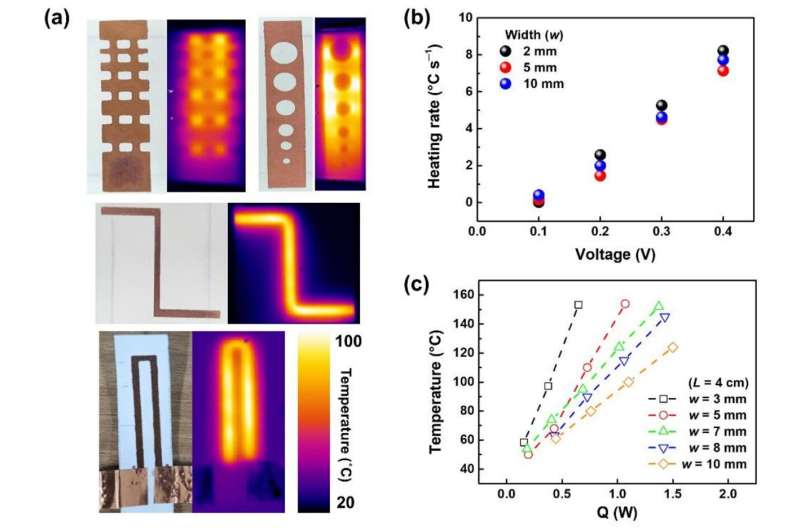
在具体制造过程中,团队通过改变电极宽度,将Cu电极非对称沉积在纸基基板上,形成电阻梯度,进而产生显著温度梯度。再将纸基基板与双层结构的液晶弹性体(LCE)集成,成功研制出节能型软体机器人,使其能在低驱动电压下实现定向爬行。张教授称,通过精确控制纸基电极上的温度梯度,诱导差异弯曲,成功模仿了毛毛虫的自然爬行动作,实现了传统软体机器人难以达成的非对称弯曲运动。
这款轻薄爬行机器人具有广泛的应用前景,可用于环境监测,或在人类因物理限制或安全问题难以到达的环境中执行特殊任务。
值得一提的是,该研究提出的电极图案化工艺简单且成本效益高,纸基执行器丰富又环保,为可扩展和可持续地制造现实生活中的软机器人提供了新方法,有望推动软机器人广泛应用于日常生活,为高端设备制造领域带来新的发展契机。
更多信息: Hyeok Oh 等人发表于《通过纸基电极上的非对称温度分布实现爬行软体机器人运动》一文,《先进功能材料》(2025 年)。