

在高端设备制造领域,机器人正加速融入日常生活各场景,从家庭、医院到工厂和农场,但其在人类周围安全操作面临挑战。传统传感器在实时、大面积触觉和接近感应方面存在不足,难以满足需求。
近日,由日本先进科学技术大学院大学(JAIST)的 Van Anh Ho 教授和 Quan Khanh Luu 博士领导的研究团队取得重大突破,开发出基于视觉的新型机器人软感知皮肤——ProTac。相关研究于 2025 年 7 月 28 日发表在《IEEE 机器人学报》上,提出可扩展的多模态机器人感知方法。
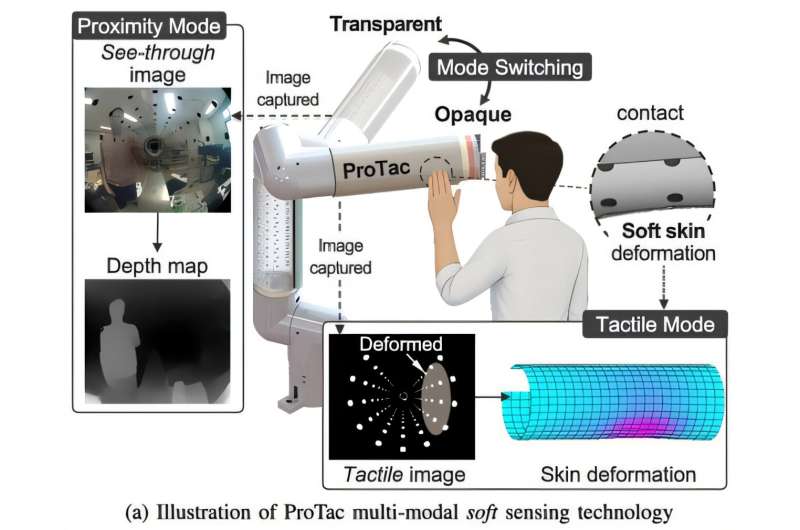
ProTac 的核心是聚合物分散液晶 (PDLC) 层,通过电压控制可在透明和不透明状态间切换。透明时,嵌入式摄像头可“透视”皮肤探测附近物体;不透明时,摄像头能追踪皮肤变形,让机器人感知触摸、压力和接触位置。这种双模传感技术仅需一层柔软薄膜,无需复杂嵌入式电子设备,即可实现实时环境感知。
Van Anh Ho 教授表示,这种设计简单的创新使机器人能实时感知大面积皮肤上的接触和附近障碍物,是传统电子皮肤难以实现的。
为验证设计,团队开发了名为 ProTac Link 的原型,这是一个包裹柔软传感皮肤的圆柱形机械臂段,两端配备立体摄像头。该原型能从多角度检测接近物体、估算距离、高精度识别多个触点,还支持自适应行为,如基于接近度的速度调整和反射性接触避免。
Quan Khanh Luu 博士称,ProTac 可应用于安全性和精细物理交互至关重要的各领域灵巧机器人操作。研究人员设想,ProTac 将在农业、家政护理领域广泛应用于协作机器人、辅助设备和软体机器人系统。在工厂中,配备 ProTac 的机器人可在人类工人靠近时减速或停止;在老年护理领域,服务机器人能在提供身体援助时保持安全、灵敏接触。长远来看,ProTac 有望促进人形机器人全身感知系统开发。
Van Anh Ho 教授还表示,这项研究为配备全身多模态软感应皮肤的智能通用人形机器人奠定基础,尤其是具有触觉的机器人。
除了皮肤,该团队还开发了学习算法和控制策略,将传感器数据转化为机器人动作,实现动态环境中的响应式自主行为。ProTac 系统设计兼顾简洁性、模块化和可扩展性,可集成到新老机器人平台。
为加速该领域进展,研究人员已开源设计文件、模型和软件。ProTac 通过融合机械简单性与多模态感知,让机器人更接近理解并安全交互复杂的触觉世界,为高端设备制造领域带来新的发展契机。
更多信息: Quan Khanh Luu 等,《基于视觉的机器人手臂近距离与触觉感知:设计、感知与控制》,IEEE 机器人学报(2025)。