

汉阳大学研究人员受自然机制启发,开发出一种基于聚合物的跳跃器,相关研究发表于《科学进展》,成功解决了如何使软材料产生强烈、快速运动这一经典工程难题。
日常中,发夹折断、伸缩笔作响等现象体现的“弹跳效应”,被小型昆虫和植物如捕蝇草巧妙利用,以放大自身力量实现快速有力运动。汉阳大学研究团队以此为灵感开展研究。
在汉阳大学教授 Jeong Jae (JJ) Wie 带领下,团队在单个聚合物薄膜内引入不同刚度图案,结合硬质与软质材料优势,解决了材料刚度与灵活性的“权衡”问题。实现快速有力跳跃的关键在于“突跳”现象,这种由双稳态结构非线性转变驱动的现象,能将储存的弹性能转化为动能,推动材料运动。
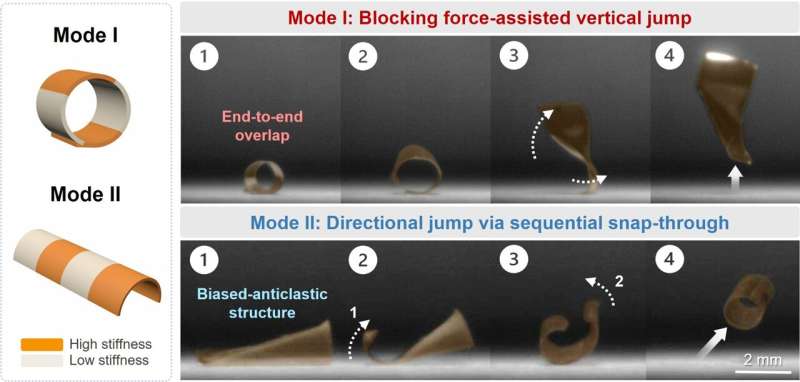
为将弹跳机制转化为可控运动,团队设计了由液晶聚合物网络制成的具有刚度变化的材料。柔软区域便于弯曲,刚性区域有效储存和释放能量。通过在角落放置刚性区域,聚合物跳跃器实现精确定向跳跃和快速旋转,改变了传统控制聚合物软体机器人运动方向需外部提示的方式,利用图案化刚度变化构建不对称性,使材料在均匀光照下不均匀弯曲并定向释放能量。在中心放置坚硬区域,跳跃器实现创纪录的垂直跳跃,达 49 毫米,约为身长的 25 倍。
此外,团队还扩展设计,延长跳跃器身长并采用软硬交替模式,打造出“双模式”跳伞者。这层单层聚合物薄膜可根据变形形状垂直或定向跳跃,展现出强大多功能性。体型更大的双模式跳跃机器人表现与单模式机器人相当,还能在两种跳跃模式间快速切换,这在基于聚合物的软体跳跃机器人中十分罕见。
展望未来,该团队的设计策略有望催生不仅能精确移动,还能提供强大、放大运动的软执行器。
更多信息: Min Jeong Hahm 等人,《光触发跳跃器中空间模式化刚度变化实现对称性破缺和高突跳效率》,《科学进展》(2025 年)。