

在高端设备制造领域,机器人技术一直是备受瞩目的焦点。尽管机器人在探索遥远星球、执行复杂手术等任务中展现出诸多技术优势,但灵活性,即抓取、握持和操纵物体的能力,长期以来一直是其难以攻克的难题。不过,如今这一局面有望被打破。
近日,马萨诸塞州丰田研究所的科学家们取得重大进展,他们成功训练出一个名为Punyo的人形上肢机器人,使其能像人类一样运用整个身体来搬运大型物体。
人类在拾取和管理物体时,会运用从细微精准的手部动作到涉及手臂、腿部和躯干的大肌肉运动(粗大运动技能)等各种技能。然而,机器人完成较大的动作,如举起并抓住大箱子,却困难重重,因为这需要它们不断进行复杂调整,以防止物体滑落或掉落。
在发表于《科学机器人》杂志的一项研究中,研究团队展示了Punyo机器人的出色表现。它能将一个大水壶扛到肩上,还能拿起并握住大箱子。该机器人依靠柔软的压力感应皮肤和关节传感器的反馈来引导自身运动。
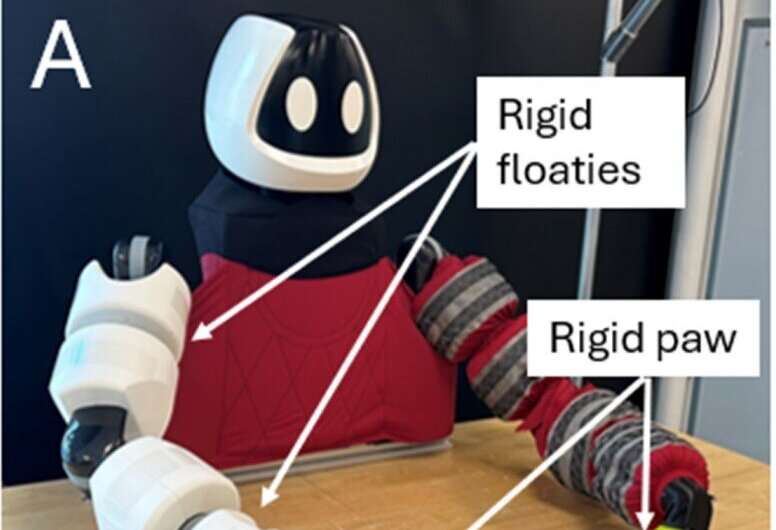
Punyo机器人成功的关键在于其具备柔软的机身(被动柔顺性)和关节的灵活性(主动柔顺性)。与刚性版本的机器人相比,它的表现大幅提升。科学家表示:“添加任何类型的柔顺性(即被动、主动或两者兼有)都是有益的,与没有柔顺性相比,成功率平均提高了206%。”
值得一提的是,Punyo机器人学习新技能极为高效。研究人员采用“示例引导强化学习”的方法对其进行训练,在虚拟环境中仅用一次演示就向它展示了操作方法,随后它自行练习直至掌握。研究团队称:“在模拟环境中收集的一次远程操作演示足以训练出风格化、接触丰富的动作策略。”
这项技术意义重大,是朝着打造更贴近日常生活的机器人迈出的重要一步。未来,这类机器人可安全可靠地搬运大型笨重物体,如家中的家具、仓库中的重型包裹;甚至能在护理环境中协助行动不便的人完成任务。而且,它们无需精心编程,仅需一次演示就能学习类似人类的技能,为高端设备制造领域的机器人应用开辟了更为广阔的前景。
更多信息: Jose A. Barreiros 等人,《通过示例引导的强化学习学习丰富的接触式全身操控》,《科学机器人》(2025)。