

韩国科学技术研究院(KAIST)研究团队在人形机器人自主研发领域取得新进展,其最新成果展现出卓越的驾驶性能与稳定性。该机器人时速可达12公里/小时,即便在闭眼或崎岖地形条件下,仍能维持良好平衡,还能完成鸭子步、月球步等复杂人类动作,成为下一代工业机器人平台的焦点。
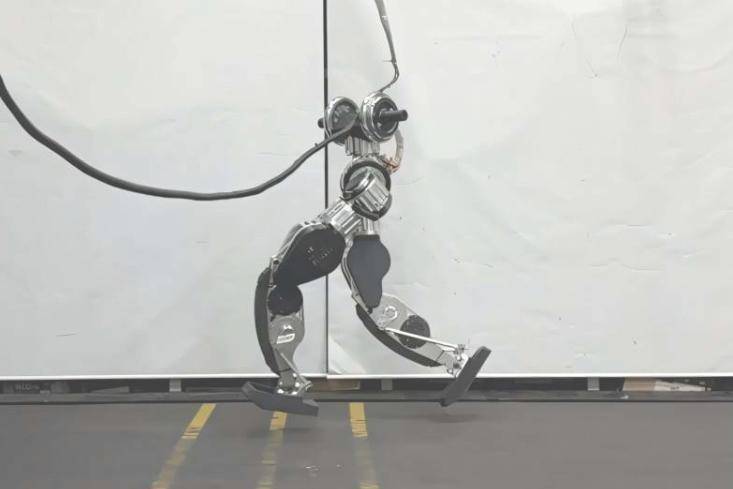
KAIST机械工程系人形机器人研究中心朴海元教授团队,专注于开发下一代人形机器人的下半身平台。该机器人设计以人为本,身高165厘米,体重75公斤,与人类体型相近。团队直接设计并制造了电机、减速器和电机驱动器等核心部件,通过自主技术实现了硬件层面的技术独立,确保了机器人性能的关键部件自主可控。
研究团队还利用自主研发的强化学习算法,在虚拟环境中训练AI控制器,成功缩小了模拟与现实之间的差距,并将其应用于现实环境,确保了算法层面的技术自主性。目前,该机器人平地上的最高速度已达3.25米/秒,爬台阶能力超过30厘米。团队正计划进一步提升其性能,目标是实现更快的行驶速度、更强的爬梯能力以及更高的爬台阶能力。
朴海元教授的团队正与多团队展开合作,旨在实现具有上半身和人工智能的完整人形硬件。他们正在开发使机器人能够执行搬运重物、操作阀门等复杂任务的技术,以满足实际工业现场的复杂需求。在此过程中,团队还开发出单腿“跳跃”机器人,展现了高水平的动作能力。朴海元教授表示:“这一成果是人形机器人研究的重要里程碑,我们在硬件和软件方面都实现了技术独立。未来,我们将继续开发完整类人机器人,以解决实际工业需求,推动机器人与人类共同工作。”
该项研究成果将由机械工程博士生JongHun Choe在国际人形机器人专业会议上展示硬件开发,同时,团队还将在机器人智能顶级会议上展示人工智能算法成果。
更多信息: Dongyun Kang 等,《通过质心速度奖励和模拟真实技术学习富有冲击力的旋转动作:单腿跳跃翻转案例研究》,arXiv (2025)。JongHun Choe 等,《设计一个带有优化变速箱的三自由度跳跃机器人:迈向双足机器人的中间平台》,arXiv (2025)。期刊信息: arXiv