

首尔国立大学的研究团队近日开发出一种新型模块化3D打印微型机器人,其尺寸小于1厘米,能通过灵活更换功能模块适应多种复杂环境,为微型机器人在现实场景中的广泛应用开辟了新路径。相关研究成果发表在《先进材料》期刊上。
传统微型机器人往往针对特定任务高度定制化,难以在不同环境和应用中通用。论文第一作者宋元俊(Won Jun Song)表示:“昆虫大小的微型机器人有望在常规机器人难以操作的领域发挥作用,比如监测狭小空间、偏远自然环境、递送药物或辅助疾病诊断。但我们希望突破这一局限,设计出能应对多样化任务和环境的通用型微型机器人。”
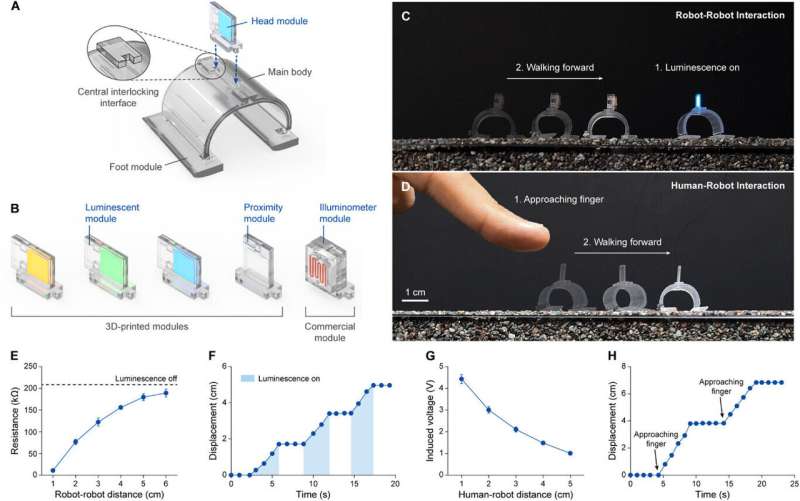
该团队设计的微型机器人由主体和三类模块组成:主体作为核心控制单元,连接并协调所有模块的运动;足部模块使其能在平坦地面、沙地甚至水面行走;头部模块支持与附近其他机器人或人类实时交互;连接模块则让多个微型机器人能够协同工作,如同一台大型设备。
这些机器人采用团队自主研发的多材料3D打印机制造,不仅能高效批量生产模块,还能根据具体任务需求快速定制特定组件,灵活扩展功能。例如,在初步测试中,这些微型机器人展现出在光滑、粗糙、颗粒状地形及水环境中的稳定移动能力。
宋元俊指出:“目前许多研究聚焦于为特定用途优化微型机器人,这确实催生了高性能的专用机器人。但要实现像无人机或波士顿动力Spot机器人那样的广泛应用,微型机器人必须能在更广泛的环境和场景中运行。”
该团队的模块化设计和3D打印策略,不仅支持大规模定制化生产,还为其他研究团队提供了灵感——未来或可开发出更多适应不同环境的可定制微型机器人。下一步,他们计划利用多材料打印技术和高性能光固化材料,进一步研发其他先进微型设备及机器人系统。
(论文信息:Won Jun Song et al, All‐3D‐Printed Multi‐Environment Modular Microrobots Powered by Large‐Displacement Dielectric Elastomer Microactuators, Advanced Materials (2025). DOI: 10.1002/adma.202507503)