

传统软体机器人制造如同“手工捏泥”——浇铸、脱模、封装,工序繁琐且难以精确控制运动。哈佛大学工程师们另辟蹊径:让打印机喷头旋转起来,在挤出材料的一瞬间,就将运动指令“编码”进机器人身体里。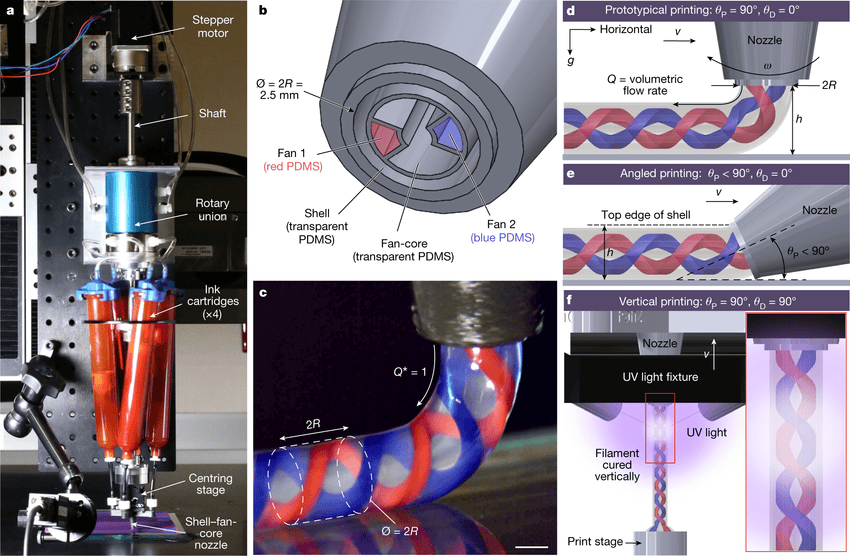
一、软体机器人的“精度困境”
软体机器人因其柔韧性和生物兼容性,在医疗、人机交互、可穿戴设备等领域需求迫切。然而,如何精确设计和控制这类机器人以满足特定用途,始终是行业痛点。
传统制造方法通常是将柔性材料铸造到模具中,在表面设计气动通道,再封装另一层形成通道。这一流程不仅耗时费力,更难以实现复杂、可预测的运动控制。
如今,哈佛大学约翰·A·保尔森工程与应用科学学院(SEAS)的研究团队给出了一套全新解决方案。他们开发的旋转多材料3D打印技术,让打印机在旋转中同时挤出多种材料,将运动逻辑直接“打印”进材料内部。
二、科创亮点:让喷头“转起来”,让材料“动起来”
2026年2月,研究团队在材料科学顶级期刊《先进材料》发表研究,首次系统阐述了这项技术的核心突破。
亮点一:单喷头双材料——“管中管”的精密架构
传统多材料打印需切换多个喷头,而新技术采用单一旋转喷头,可同时挤出两种材料:
外壳材料:聚氨酯弹性体,形成坚固耐用的“身体”
内核材料:泊洛沙姆凝胶——一种常见于发胶和洗护产品的温敏性聚合物,作为“牺牲墨水”临时占据未来气动通道的空间
打印完成后,只需用冰水冲洗,内部凝胶即可液化流失,留下精密的中空通道。这些通道相当于可编程的“血管”和“肌肉”。
亮点二:旋转编程——通道方向就是运动方向
这项技术的核心奥秘在于旋转。
喷头在挤出过程中持续旋转,研究人员可精确控制每种材料在打印丝材中的分布位置。通过调控喷嘴设计、转速和物料流动速率,每个内部通道的方向、形状和大小都可被编程。
当向这些通道充气或注入液体时,由于通道壁厚不均,结构就会向着预设方向弯曲——运动指令直接被编码在几何结构中。研究生杰克逊·威尔特解释道:“我们用单一喷头挤出两种材料,通过旋转喷头,就能预设机器人充气后的弯曲方向。”
亮点三:连续打印路径规划——算法绘制复杂形态
为制造人手般复杂的仿生结构,团队引入基于费马螺线的连续打印路径规划算法。该算法可将任意二维图像(如花朵或手掌轮廓)自动转换为一条连续不断的打印路径,打印机“一笔画”完成整个复杂结构的填充。
三、技术内涵:从“一维弯曲”到“五指抓握”
研究团队通过一系列演示,展现了这项技术的强大可编程能力:
一维到二维的形变控制:
周期弯曲:通过多次180度旋转,长丝在充气后如波浪般周期性弯曲
螺旋扭转:连续旋转打印,在83kPa压力下实现末端880度角位移
局部铰链:在长丝中打印一段粗通道,两侧连接细通道,形成可“对折”超180度的铰链结构
二维表面编程:
研究团队并排打印多根长丝,构建出可大面积形变的“表面”。通过为相邻区域设置相反通道方向,实现了充气后有的区域向上拱起、有的向下弯曲的复杂形貌。
功能验证:机器手与机器花朵:
团队打印了一个六瓣花朵图案——所有花瓣通道朝向内侧,充气后花瓣优雅地向中心卷曲,仿佛正在绽放。
更令人惊叹的是一只五指机器手:算法自动生成覆盖手掌和五根手指的连续打印路径,并在手指关节位置预设“铰链”结构。最终成品拥有5个独立气路输入,可独立控制每根手指弯曲。在验证实验中,这只手被固定在机械臂上,成功将泡沫小球稳稳抓起。
四、应用前景:从手术机器人到人体辅助装置
这项技术的核心价值在于彻底重构了软体机器人的设计逻辑:
1. 无需模具,快速定制
传统方法需数天组装的复杂装置,如今仅需数小时即可完成重新设计。“我们不使用模具。我们打印结构,快速编程,并能迅速定制驱动系统。”威尔特表示。
2. 医疗领域潜力巨大
这种可编程柔性结构可应用于适配人体组织的手术器械、贴合身体的可穿戴辅助设备。前博士后研究员娜塔莉·拉森(现就职于斯坦福大学)认为这是该领域的理念性变革:过去运动功能是附加在机器人上的部件,如今功能可直接“被打印进”机器人本体。
3. 工业制造新工具
从抓取易碎物品的工业夹持器到水下作业的柔性执行器,这项技术为需要精准、柔顺操作的场景提供了全新解决方案。
五、产业意义:用“几何结构”作为“代码”
这项研究的深层价值在于用几何结构取代复杂的控制程序。传统软体机器人需要外部控制系统来规划运动;而哈佛团队的技术让运动逻辑内化于材料之中。
正如《先进材料》论文所述,该方法本质上是在用几何结构作为代码,让设计者直接控制软体结构充气后的运动表现。当打印机喷头旋转起来,软体机器人的未来也随之转向——向着更精准、更快速、更智能的方向。
来源:哈佛大学约翰·A·保尔森工程与应用科学学院(SEAS);作者:Jennifer Lewis教授实验室(多材料打印领域先驱),研究生Jackson Wilt、前博士后研究员Natalie Larson;题目:Rotational Multimaterial 3D Printing for Programmable Soft Robotics Actuators(旋转多材料3D打印可编程软体机器人执行器);发表于:Advanced Materials(2026年2月)。