

在浑浊不见五指的水下,如何让机器人精准贴近桥墩或大坝表面?广西科学院给出的答案不是更亮的灯,而是一根能“触摸”的机械臂。这项创新让水下机器人在高浊度环境中也能自主定位和贴面导航,为水利、交通、海洋工程的安全检测提供了全新的智能化解决方案。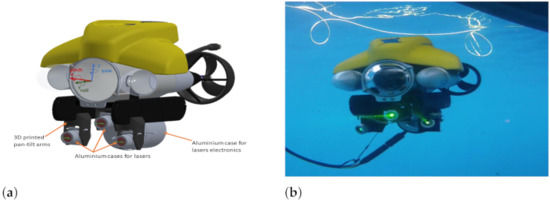
一、水下检测的“盲人之困”
水下基础设施——桥梁桥墩、大坝坝体、海上风电基础、海底管道——的安全检测,是保障国家交通、水利、海洋工程安全运行的关键环节。传统方式依赖蛙人摸探排查,不仅危险,且效率低下。用水下机器人替代人工作业,已成为行业发展的必然趋势。
然而,一个棘手的难题长期悬而未决:在河流、近岸、河口等浑浊水域,悬浮泥沙会严重降低水下能见度,视觉和激光定位方法几乎失效。声学定位虽能在开阔水域工作,但在复杂结构附近,多重反射和环境噪声使其难以持续提供高精度信息。
这就好比让一个盲人在陌生房间内摸索——操作员难以精准控制机器人与检测目标的距离和姿态,不仅作业难度陡增,检测效果大打折扣,设备碰撞风险也随之升高。
二、科创亮点:让机器人学会“触摸”世界
2026年3月2日,广西科学院高端装备制造创新团队在船舶与海洋工程领域顶级期刊《Ocean Engineering》发表研究成果,创新提出一种基于接触感知的水下相对位姿测量系统及其支撑下的相对运动控制策略。
亮点一:仿生触觉设计——给机器人装上“手指”
研究团队在水下机器人艏部安装了一种全自主设计的新型压触臂,模拟潜水员在低能见度下的触觉探测模式。当机器人接近被测结构时,压触臂与被测目标发生物理接触,通过对压触臂状态的自我感知,实时测算水下机器人与前方结构目标的相对距离和姿态。
这一设计的核心优势在于:完全不受水体浑浊度、光照条件的影响——无论水中泥沙浓度多高,只要“手指”能碰到,就能定位。
亮点二:级联控制框架——让机器人学会“贴身跟随”
基于这套接触式传感系统,研究团队进一步设计了级联控制框架。通过构建关键虚拟状态变量,将压触臂测量的状态信息融入水下机器人运动控制中,实现机器人相对于目标结构的自主定位和表面跟随导航。
这意味着机器人能够像壁虎一样“贴”着结构表面移动,始终保持稳定的观测间距和角度,为高清摄像、声呐扫描等检测设备提供理想的作业平台。
亮点三:仿真验证——平面、拐角、弧面全面覆盖
团队基于物理模型驱动的仿真试验验证了该策略的有效性。结果显示:
面对平面结构:机器人自主维持预期观测间距和角度
面对拐角面:压触臂感知几何变化,引导机器人平滑转向
面对弧形面:实现稳定的曲面仿形运动
在整个过程中,操作员只需控制横向和垂直运动两个自由度,大幅减少了常规水下机器人在抵近观测中的人工操作量。
三、应用前景:从“人工操控”到“智能贴身”
1. 水利工程安全检测
中国拥有数以万计的水库大坝、水闸、堤防,定期检测是保障安全运行的基础。该技术可让水下机器人在浑浊库区自主贴近坝面,精准采集缺陷影像,大幅提升检测效率和安全性。
2. 桥梁桥墩水下探查
跨江跨海大桥的桥墩水下部分常年受水流冲刷,易产生掏空、露筋等隐患。传统潜水摸探风险高,视觉检测受浊度限制大。接触式定位技术让机器人能在浑水中稳定贴桥墩作业,为桥梁安全评估提供可靠数据。
3. 海上风电基础运维
海上风电基础的水下结构复杂,且近岸海域往往浊度较高。该技术可支持机器人在桩基表面自主巡航,检测防腐涂层、焊缝、海生物附着情况。
4. 海底管道巡检
在管道近底段,视觉条件差,声学定位易受管道多路径反射干扰。接触式定位可作为高精度补充手段,让机器人沿管壁“摸着走”,实现毫米级贴近检测。
四、产业意义:为无人化水下检测装上“触觉导航”
这项研究的深层价值在于重新定义了水下机器人在极端环境下的作业模式。传统水下检测高度依赖操作员的技术水平和经验判断,而接触式定位技术让机器人拥有了自主“触觉”,能够在人类无法直接干预的环境中稳定工作。
正如论文第一作者、广西科学院高级工程师卢迪所言:“这一进展为提升水下检测作业的智能化程度和水下无人化检测效率提供了新的技术支撑。”
当水下机器人在浑水中学会“摸路”,那些曾经只能靠潜水员冒险完成的危险作业,将逐步被智能装备替代——这是水下检测领域的一次重要跨越。
来源:广西科学院高端装备制造研究所、中国水利水电科学研究院;作者:卢迪(第一作者,广西科学院高级工程师);赵宇飞(通讯作者,中国水利水电科学研究院正高级工程师);王晓琳(通讯作者,广西科学院研究员);题目:A novel Contact-Based relative positioning methodology for underwater inspection robots: Conceptualization and numerical validation;发表于:Ocean Engineering(2026年3月2日)。