

新加坡国立大学设计与工程学院的研究人员开发出一种平台,使实验室培养的肌肉组织能够通过自我训练达到破纪录的强度,无需外部刺激。通过机械方式耦合两个肌肉组织,让它们持续相互拉扯,将自然收缩转化为全天候锻炼。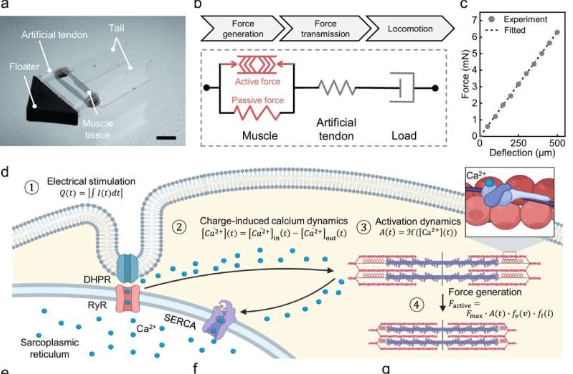
这种强化肌肉驱动了名为OstraBot的箱鲀式游泳机器人,其速度达到每分钟467毫米,成为所有骨骼肌驱动的生物混合机器人中报告的最快速度。这项进展解决了生物混合机器人领域长期存在的瓶颈,即由活细胞驱动的机器性能受限。肌肉致动器因其柔软、安静和小尺度高效特性,有望应用于微创医疗工具、环境传感器和可生物降解机器人。
领导研究的助理教授Tan Yu Jun表示:“研究人员长期关注活体肌肉驱动机器人,因为生物致动在小尺度上柔软、适应性强且节能。然而,这些系统受限于培养骨骼肌的低力输出。如果致动器弱,机器人就无法快速移动或执行有用任务。”他补充说:“这项研究旨在消除基本瓶颈,为设计可持续的高性能生物混合系统开辟道路。”
关键创新在于利用年轻骨骼肌细胞成熟过程中的自发收缩行为。团队设计平台将两个肌肉组织通过滑块耦合,实现持续自主的缩短和延长循环,无需外部干预。Tan解释说:“随着细胞成熟,它们自然开始自发收缩。因为两个组织连接,它们持续相互拉扯,有效进行锻炼。”自我训练肌肉产生7.05毫牛最大力和每平方毫米8.51毫牛应力,创下该细胞系在生物混合机器人中的最高纪录,方法更具可重复性和成本效益。
团队开发基于生理学的模型指导OstraBot设计,受箱鲀运动方式启发,机器人将模型结构与单个训练肌肉配对,驱动两个灵活尾巴。在最佳条件下,游泳速度比传统培养肌肉驱动的机器人快三倍以上。机器人还展示精确可控性,速度可通过调整电场强度连续调节,并能响应拍手信号启动和停止。Tan说:“拍手表明机器人不仅是活的——它是可控的。强化的骨骼肌使机器人能够清晰响应外部信号,这对实际应用至关重要。”
团队正致力于开发所有结构材料可生物降解的系统,机器人执行功能后可安全分解。潜在应用包括部署在湿地或珊瑚礁等敏感生态系统的环境监测设备,以及临时植入工具在体内溶解前执行临床任务。Tan表示:“强度是重要里程碑,但长期稳定性、能源效率和生命周期设计同样关键。目标是开发高性能且环境负责的生物混合机器。”下一步计划包括整合可生物降解材料、完善控制策略并提高系统耐久性和效率。
该研究于2026年3月18日发表在《自然通讯》期刊。2025年12月,论文第一作者陈鹏宇博士在材料研究学会2025年秋季会议上获得最佳海报奖。
出版详情:作者:National University of Singapore;标题:《Swimming robot propelled by lab-grown muscle hits record speed》;发表于:《Nature Communications》(2026);期刊信息:《Nature Communications》。