

美国亚利桑那州立大学的研究团队成功开发出一种受生物启发的机器人肌肉技术,使机器人能够举起高达自身重量100倍的物体。这项创新技术基于气动人工肌肉,使机器人更轻便、小巧,且无需外接电源。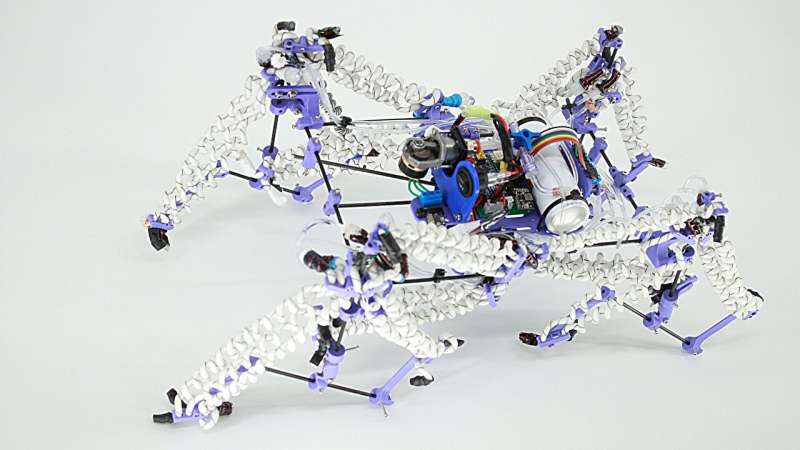
该研究由亚利桑那州立大学机器人执行器与动力学实验室的博士生埃里克·韦斯曼主导,相关论文已发表于《美国国家科学院院刊》。实验室主任、助理教授孙杰锋作为合著者参与项目。韦斯曼表示:“本质上,我们开发了一种模仿真实肌肉的新型人工肌肉,使其更具多功能性、更轻便且更强大。”
这种被称为螺旋各向异性增强聚合物(HARP)的执行器,模仿自然肌肉的收缩与扩张机制,适用于软体机器人。韦斯曼描述道:“这些肌肉看起来像小管子,盘绕如意大利面。充入少量空气时,它们会膨胀和收缩。”由于多功能性和适应性,压力需求显著降低,使机器人能够独立行走并携带所需设备。
气动人工肌肉技术已获得临时专利,其应用场景广泛。在灾难响应中,软体机器人可穿越废墟搜寻幸存者;在家庭环境中,能协助老年人完成日常任务。HARP执行器耐高温,适用于工业冲洗、海洋探索及热液喷口采样。其灵活性和抓取能力也适合农业与工业用途。
孙杰锋实验室的另一项目“仿生象鼻臂”,由博士生王家赫开发,灵感来源于象鼻的灵活性。这种软体机器人手臂能轻松越过障碍物,适用于工业检查与操作任务,其轻量结构降低了设备损坏风险并提升工人安全性。王家赫指出:“在化工厂或拥挤生产线,设备难以触及且对碰撞敏感,软体机器人可避免停机。”
在农业领域,薄型版本可协助植物授粉,避免无人机气流干扰作物。厚型版本则可用于太空任务,帮助宇航员进行维护工作。孙杰锋补充道:“软体机器人手臂能进入茂密叶冠层执行授粉功能,绕过障碍。”此外,博士生罗汉·卡塔夫卡开发的背部支撑设备(BSD)结合气动人工肌肉,为工业任务提供可调辅助力,减轻过度劳累。
孙杰锋展望道:“这些柔软、灵活的肌肉设备可应用于各种机器人,因其小巧轻便且无夹捏危险。使用太空级材料后,还能为宇航员设备提供移动性与敏捷性。”气动人工肌肉技术在机器人领域展现出广阔前景,涵盖农业、工业、医疗及太空探索等多个方面。
出版详情:作者:Terry Grant, Arizona State University;标题:《Air-powered artificial muscles could help robots lift 100 times their weight》;发表于:《Proceedings of the National Academy of Sciences》(2026)。