

中国研究人员与AI机器人公司Galbot合作,开发了一个名为LATENT的系统,能够教人形机器人打网球。该系统利用不完美的人类动作数据,通过收集业余玩家五小时的网球技能片段,构建潜在动作空间,并使用强化学习进行训练,最终部署在Unitree G1机器人上。这项创新方法旨在克服机器人复制竞技运动技能的挑战,如动态运动和高精度需求。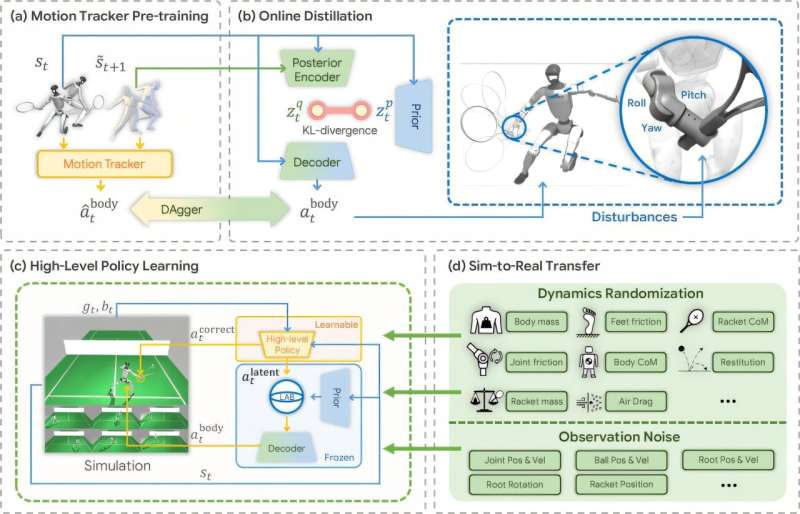
研究团队在预印本网站arXiv上描述了LATENT系统,该系统通过处理碎片化的人类动作数据,如正手击球、反手击球和移动技能,降低了学习难度。研究作者解释说:“我们的关键见解是,尽管不完美,这种准真实数据仍然提供了关于人类在网球场景中原始技能的先验信息。通过进一步校正和组合,我们学习到一个人形策略,可以在广泛条件下持续击打来球并将其返回目标位置,同时保持自然的运动风格。”
在真实球场测试中,人形机器人展示了与人类对战的能力,使用正手和反手击球,并适应不同球场区域。经过10,000次试验,LATENT系统在成功率、准确性和运动自然度方面优于以前的方法,最高达到96.5%的成功率。团队指出,系统仍有改进空间,例如结合主动视觉来减少对动作捕捉的依赖,并扩展任务设定以更接近真实比赛。
LATENT系统的开发者表示,该框架可应用于其他运动或任务,特别是在缺乏完美人类动作数据的情况下。这项进展为机器人学习竞技技能提供了新途径,有望推动人形机器人在动态环境中的性能提升。
出版详情:作者:Krystal Kasal, Phys.org;标题:《Humanoid robot learns impressive tennis skills from imperfect human motion》;发表于:《arXiv》(2026)。