

当全球导航卫星系统信号完全中断,地下矿山铲运车如何自主穿行于蜿蜒狭窄的巷道、快速通过采场与卸载点之间密集的作业区域?长期以来,地下铲运机的自主导航依赖绝对导航(AN)或反应式导航(RN)。前者在连续多次转向中容易出现误差累积,后者在长直段缺乏全局定姿能力。重庆大学、中南大学、福州大学等联合团队最近提出一种混合导航策略,将预置地图的精准定位与实时传感器的动态感知优势在时空上协同部署,首次在同一框架内解决了“在转弯处不迷路、在直道不漂移”的深地作业难题。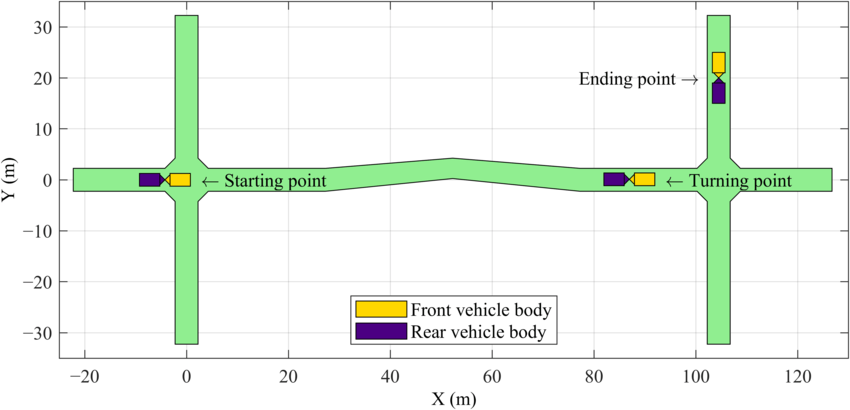
绝对精,但会“飘”;反应灵,但会“盲”
LHD是地下矿山无轨化开采的核心设备,负责将采场矿石铲装后沿巷道运输至卸载点。传统有人操作面临高尘、高湿、噪声甚至垮塌风险,自主化转型迫在眉睫。
地下环境GPS信号完全屏蔽,目前主流技术路径有两种:
绝对导航依赖激光雷达/惯性导航单元配合预建地图,在巷道转弯处优势明显,可实现厘米级精确定位。但问题在于,长期运行中机械转向误差、车轮磨损和悬架沉降等扰动易导致误差逐渐累积——进入窄巷时,“过于自信”的绝对定位可能使车辆蹭上边帮甚至卡死在巷道上。
反应式导航则相反,不依赖预置地图,完全通过实时传感器(激光雷达、视觉相机、超声波)动态感知环境并即时调整。在直道空旷段灵活高效,但进入多岔口、深弯道路等地形时,由于无法获取全局位姿,容易“迷路”——选错出口,甚至陷入回环死区。
该论文第一作者所在团队深入分析了这一两难困境:“绝对导航与反应式导航各有优势,但无论是单一路径跟踪,还是纯实时感知,在复杂多变的井下环境中都难以全覆盖。”如何在同一台铲运车上集成两种技术、在不同路段自主切换,成为LHD自主导航从理论走向工程部署的关键瓶颈。
协同部署,各取其长——从“二选一”到“自动切换”
2026年4月20日,重庆大学资源与安全工程学院、中南大学资源与安全工程学院、福州大学紫金地质与矿业学院及深圳中金岭南有色金属股份有限公司等单位联合研究团队在国际机器人领域权威期刊《Journal of Field Robotics》发表研究成果,首次提出混合导航策略。该策略的核心创新在于将绝对导航与反应式导航的优势在时间和空间上进行了协同部署。
核心设计:以“绝对导航负责转向、反应式导航负责直道”的时空切换逻辑,实现自主最优模式选择。在巷道转弯处,系统依托预建地图进行精确定位,凭借已知环境几何特征实现可靠路径跟踪;一旦完成转弯进入长直巷道,系统自动切换为反应式导航,不再依赖绝对定位,仅通过实时激光雷达与里程计数据即时调整轨迹,从而实现“只在必要时动用‘精密弹药’,在平稳路段就切换到‘低功耗巡航’”。
试验验证:仿真试验表明,该混合导航在窄巷转弯精度和直道稳健性方面均明显优于单独使用AN或RN。实地采场试验进一步验证了系统在实际工况中的稳定能力:铲运车在典型窄巷中可实现直线段速度约1.8 m/s、转弯速度0.6 m/s,同时在高粉尘、低照度及多障碍物干扰下仍能保持稳定作业。
从“单一方案”到“融合架构”——LHD自主导航的范式变革
这项研究的实质是将LHD导航系统从一个固定方案进化为一种“道路自适应”融合架构。在更深层次上,HN策略通过不同路段切换不同原理的导航模块,形成了一种可泛化的鲁棒性设计方案——即便任一模块在高尘、积水和多干扰源等极端条件下出现瞬时性能下降,另一模块也能接力完成定位或避障,确保任务不中断。也就是说,HN不是简单保留两套系统,而是让它们在时间轴上接力合作,共同消除了纯绝对导航的累积误差和纯反应式导航的“迷路”风险。
论文还指出,该策略在直道段“不依赖于绝对定位”独立调整轨迹的特点,为未来扩展提供了新的可能性。这为以后在长直巷道中引入更轻量级的车道保持算法甚至分布式传感器辅助方案留下了接口——意味着HN不仅解决了当下的问题,也具备持续迭代和扩展的架构基础。而对实际矿山来说,在井下无GPS的环境下稳定跑出上述速度,也意味着LHD在下井轮班、采场转运等关键工序中具备了真正可替代人工作业的工程能力。
深部开采的底层驱动
随着我国采掘深度不断下探,巷道弯幅减小、热害与粉尘加剧、通讯衰减,传统人工操作的风险和舒适度挑战持续增长,自主导航已成为急倾斜深部采场无人化的刚需。混合导航策略的价值正在于此——它不依赖5G或UWB等外部定位设施,仅依靠车载传感器和预建地图即可完成自主穿梭,对通讯衰减严重的深井极为友好,部署成本也远低于全覆盖铺设定位基站的替代方案。同时,HN提供的“定位+避障”冗余能力也为铲运车与井下其他传感器盲区内的低矮车辆协同作业提供了安全基础,给井下混编作业带来新的保障。
在实际应用中,随着传感和算力成本持续下降,以HN为底层框架的LHD自主导航方案也正从“能跑”走向“跑得稳、跑得久、跑得安全”。
为无人矿山筑牢“地基”能力
LHD的路径规划、定位精度和运行时稳健性是地下采掘自动化从“单机演示”走向“真实部署”的关键环节。HN策略提供的是一种以“最优原理自适应”为核心的方案,不限于LHD,还可拓展至其他井下无轨装备,在GPS拒止、多岔巷道并存、扰动源复杂的采深环境中构建“通用导航底板”。
可以说,混合导航策略让地下矿山的铲运车第一次拥有了“知道自己在哪”且“知道该往哪走”的双重底气。这既是对井下自主导航“二选一”困境的突破,也为智慧矿山从远端遥控跨越到真正意义上的自主采掘提供了一个稳健、可落地、可扩展的底层技术方案。