

狭窄巷道、光线昏暗、无GPS信号、地形崎岖——这是地下矿山给巡检工作设置的“天堑”。如今,一支由浙江大学领衔的跨国研究团队,正在将四足机器人打造成能够独立穿越这些极端环境的“勘探先锋”。最新研发的自主巡检框架QRIVAS(四足机器人智能视觉采集系统),攻克了地下复杂环境中自主导航的众多关键技术瓶颈,在仿真测试中实现导航成功率100%,在缩尺桥柱测试中达到96.7%。这一突破不仅为桥梁等交通基础设施的智能感知提供了全新方案,更为我国地下矿山无人化巡检作业开辟了广阔前景。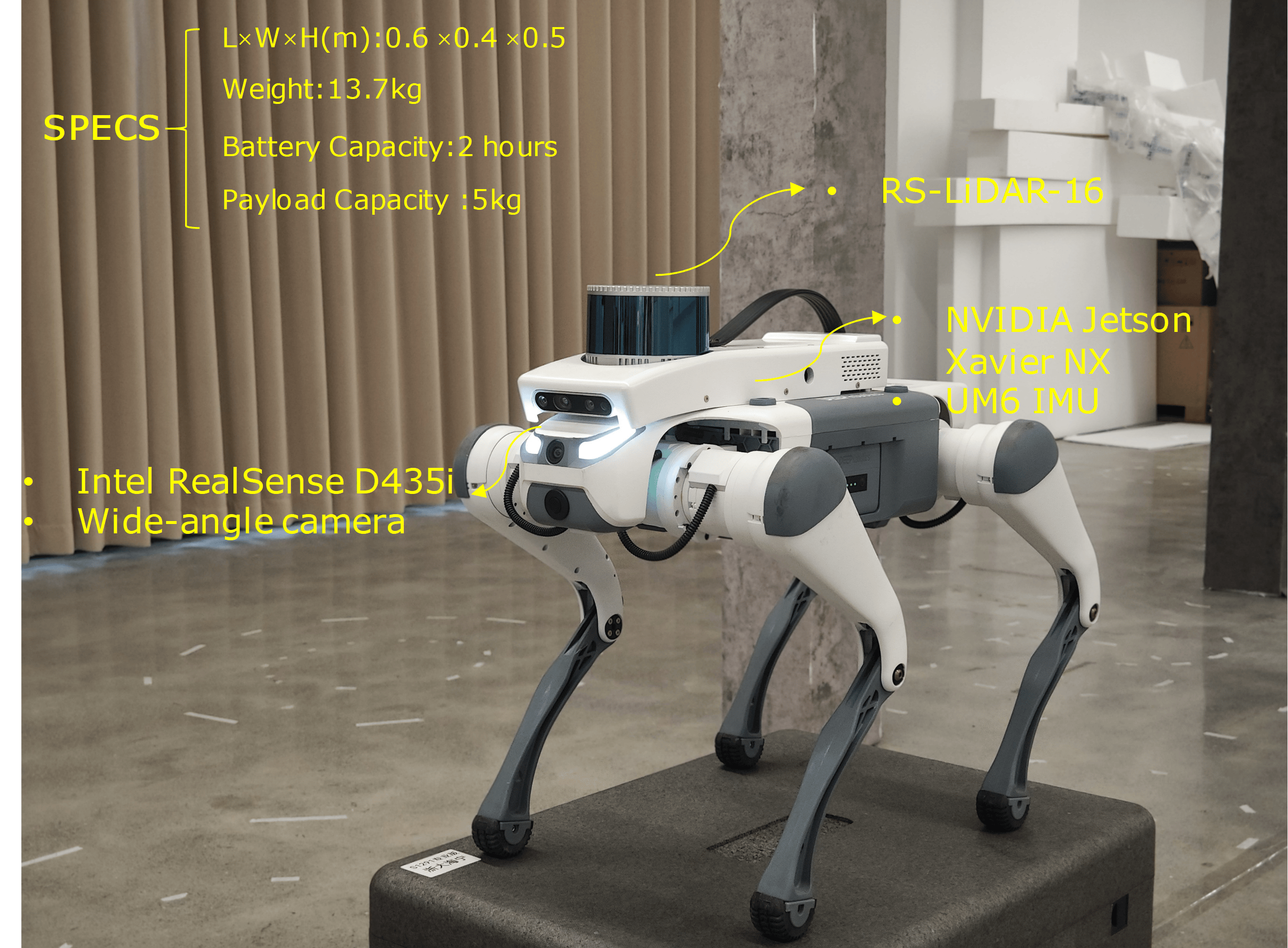
为极端环境中的机器人装上“感知中枢”
桥梁墩柱的阴面、钢结构内部的有限空间、地下矿井的昏暗巷道——这些区域传统摄像头视野受限、GNSS信号彻底丢失、墙面纹理贫乏,常规巡检机器人极易迷失方向或撞上障碍物。现有机器人方案在GNSS拒止和低照度环境下普遍存在导航困难。
QRIVAS的核心创新,在于首次将3D LiDAR SLAM(即时定位与地图构建)与实时语义分割技术深度整合。LiDAR SLAM负责在不依赖GNSS的情况下实时构建周围环境的三维空间模型并定位自身位置;实时语义分割则赋予机器人“识别关键目标”的视觉推理能力——能从激光雷达和视觉传感器获取的海量信息中实时判断哪些是桥墩、哪些是检修通道、哪些是需要重点检查的结构面。两项技术的深度耦合,使四足机器人在GNSS拒止和低照度条件下仍能自主导航,并精准锁定目标结构。
QRIVAS的另一个特点是“无图作战”——不依赖预先构建的地图。这意味着机器人能像人一样,在陌生的矿山巷道中边探索边规划,而不是被锁死在预设路线上。
用“硬指标”证明技术成熟度
研究团队在模拟混凝土铁路高架桥和1:3缩尺模型上进行了系统验证。在仿真环境中,导航成功率达到了100%——意味着没有任何一次试验出现路线偏离、目标丢失或碰撞中断;在实物缩尺模型中跨越六个桥柱的平均任务导航成功率也达到了96.7%。更为关键的是,即使在粗糙的人工草坪和高路缘石等与理想平整路面差异极大的复杂地形条件下,QRIVAS仍然保持了稳健的自主运行能力。
这些数据背后的技术意义值得深度审视:井下巷道的地面条件远比普通厂区复杂,大量碎石的坑洼路面、缆线和道床的连续起伏、以及轨道设施形成的台阶状障碍,都会让常规导航算法失效。QRIVAS所验证的在非平整地形下的96.7%导航成功率,与井下矿山的实际地形条件高度契合,为其从实验环境向地下矿山真实作业场景“无缝过渡”提供了最重要的技术背书。
四足机器人成为地下矿山的“智能游骑兵”
我国金属和非金属矿山中超过90%采用地下开采,巷道总长达数万公里。井下环境水汽重、粉尘大、照明差,许多区域用隔爆壁、风门和防火栅栏分隔为有限空间,人工进入极为不便、安全风险高,是公认的“巡检硬骨头”。
QRIVAS所攻克的三项核心技术,恰好与地下矿山巡检的刚需一一对应:
① GNSS拒止下的可靠定位——矿用定位系统无法穿透厚岩层,井下本身就是一个巨大的无GNSS空间。QRIVAS以3D LiDAR SLAM为核心的定位方法正是为此量身定制。
② 低照度与纹理贫乏环境识别——照明条件差、墙面灰暗的光线环境下,传统双目视觉方案极易失效。QRIVAS将LiDAR点云与语义分割相结合,形成不依赖良好光线的“多模态感知冗余”。
③ 复杂地形下的自主越障与导航——斜坡、碎石、轨道、排水沟,每一条井下巷道都是一道地形考题。QRIVAS在高路缘石和粗糙草坪上的稳健表现,与井下碎石道床具有极强的地形类比性,验证了其越障和地形适应能力。
QRIVAS的技术架构为矿山井下巡检机器人的开发提供了可直接复用的范式。通过将SLAM定位与语义目标识别解耦又融合,并强化无图自主导航能力,它能够为矿山巡检机器人定制化开发提供从“感知闭环”到“决策执行”的完整技术框架。
矿山巡检无人化的产业浪潮正在涌来
QRIVAS的突破恰逢矿山智能化建设的关键窗口期。2026年初,梅安森等多家上市公司已完成矿山防爆四足机器狗的整体设计方案论证,防爆电机、专用防爆电池等核心零部件已通过专项试验验证;2026年5月,在贵阳召开的第六届中国贵州国际能源产业博览交易会上,云煤时代人工智能科技公司展出的防爆四足巡检机器人原型,集成了激光雷达、热成像、气体传感器等多重感知系统,可实时监测瓦斯、温度、烟雾等参数,标志着四足巡检机器人从实验室向矿山的产业化进程已加速启动。
QRIVAS所验证的无图自主导航、多模态感知、复杂地形巡检框架,正是当前矿山巡检机器人产业化最急需的共性基础技术。论文合作者列表中的浙江新引领导航智能科技有限公司,已经为QRIVAS框架在四足机器人上的工程化落地提供了产业支撑——从高校实验室的原型验证到企业的工业产品开发,技术转化的路径正在打通。
从“两难”中开辟降本增效新路径
当下矿山面临的“不巡检——安全隐患大”“巡检频次高——人力成本激增”的两难困境正在加剧。四足智能巡检机器人的规模化部署一旦实现,将产生多重系统性效益:
安全层面——替代人工进入有限空间、有毒有害气体区、采空区等高风险区域,从根本上降低人员安全事故概率。
效率层面——全天候全时段巡检,以一致性极佳的数据采集替代疲劳巡检,实现隐患事件从“事后记录”到“实时发现—即时预警”。
成本层面——将高水平巡检人员从一线高风险环境解放至远程控制中心,一人多机作业一旦实现,人员总工时和综合成本将大幅下降。
站在QRIVAS研究成果提出的“AI驱动机器人系统改变传统基础设施维护实践”的战略远见之上,地下矿山或将成为这一技术路线最先实现规模化应用落地的关键行业赛道。