

桥梁检测是全球土木基础设施维护中最繁重、最危险的任务之一。在高架箱梁、桥墩承台、桥底涵洞等GPS信号拒止的盲区,传统人工检测面临作业风险高、视觉死角多、效率低的长期困境。浙江大学联合杭州电子科技大学等团队的最新研究,提出QRIVAS(四足机器人智能视觉采集系统),让机器人在完全不依赖地图和环境先验信息的前提下,实现对桥梁关键构件的自主探索、精准识别与全覆盖图像采集,在仿真环境中导航成功率达100%,在实际桥梁构件巡检中平均任务导航成功率达96.7%。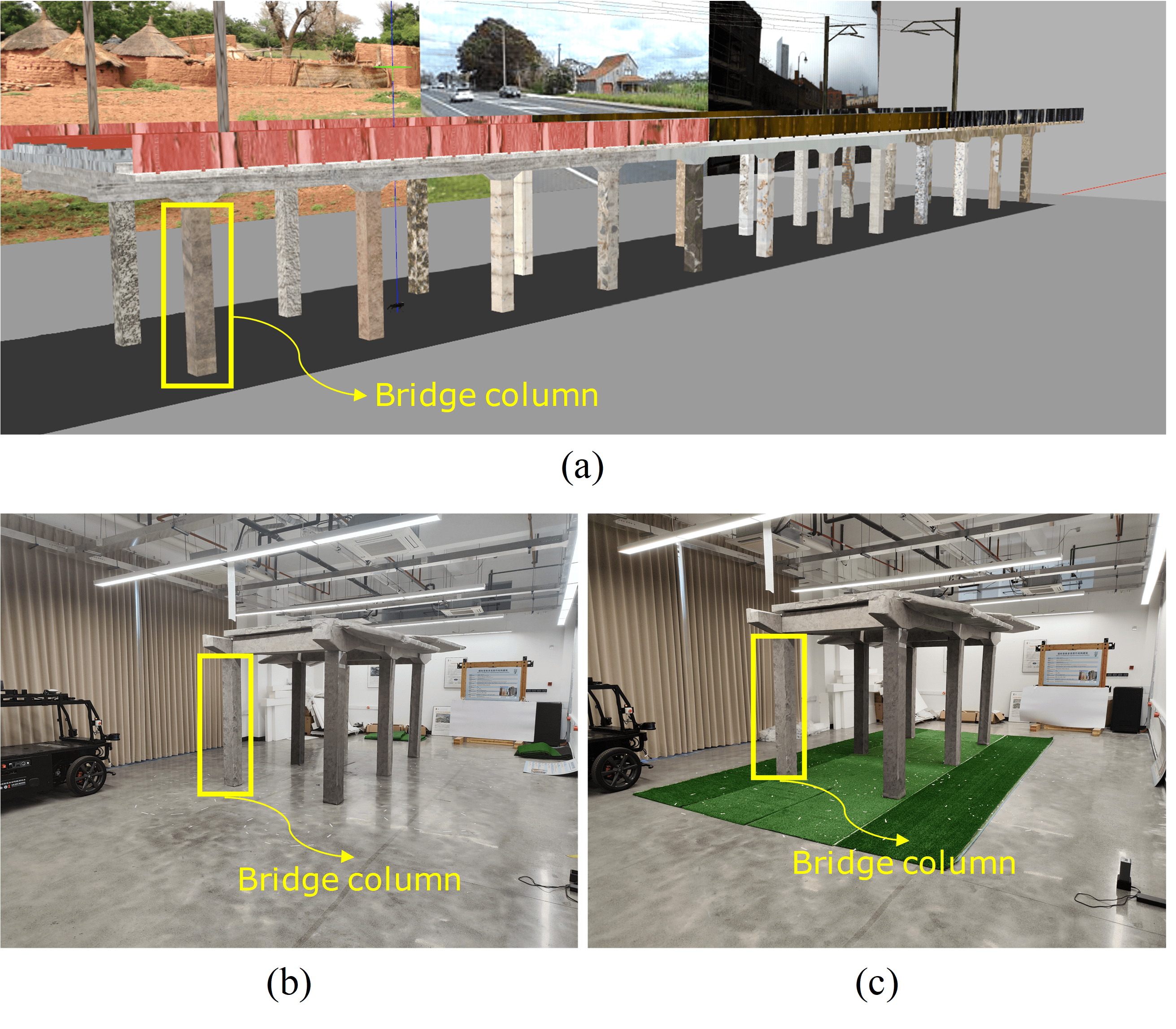
桥梁检测的“盲区困境”
桥梁是交通运输体系的核心节点,其结构健康监测直接关系到公共安全与工程寿命。桥墩、盖梁、梁底等关键构件往往位于GPS信号无法覆盖的箱梁内部、桥墩底部或地下涵洞中,且缺乏纹理特征和稳定照明。传统人工检测需要搭设脚手架、高空作业车甚至攀爬作业,存在巨大的安全隐患,一条长约11公里的隧道,人工单次巡检耗时近22小时;同时,无人机在桥底视点和密闭空间中也因GPS缺失和气流紊乱难以稳定作业。
现有机器人巡检方案大多依赖预先构建的高精地图,但在缺乏先验信息的未知环境中(如桥梁新建后的首次检测、灾后桥梁的紧急巡检),预先建图的成本极高、周期漫长,甚至根本无法获取。因此,如何在无地图、无GPS、弱纹理、低照度的极端条件下实现自主导航和高精度视觉采集,成为土木工程与机器人技术交叉领域亟需攻克的核心难题。
当四足机器人学会“盲人摸象”
2026年5月20日,浙江大学联合杭州电子科技大学、上海建科检验有限公司等机构在Journal of Field Robotics发表研究成果,首次提出QRIVAS系统——一套融合三维LiDAR SLAM与实时语义分割的四足机器人自主框架。该系统在不依赖先验地图的情况下,实现了对桥梁关键构件的自主探索、精准识别与全覆盖图像采集,填补了土木工程智能检测领域中极端环境自主导航的技术空白。
亮点一:3D LiDAR SLAM引领自主导航与建图
研究团队在四足机器人平台上搭载了Ouster OS1-64线激光雷达,通过3D LiDAR SLAM(即时定位与地图构建) 技术,让机器人在无GPS信号、弱纹理地面环境中实时感知周围环境,同步构建高精度三维点云地图并解算自身位姿。这是四足机器人首次在土木工程环境下将SLAM导航与语义识别深度融合,攻克了箱梁内部等密闭空间弱纹理、低光照导致的定位漂移瓶颈。
亮点二:实时语义分割让机器人“看懂”桥墩
在实时导航的同时,团队部署了高效轻量的实时语义分割网络,对LiDAR点云中的桥墩、盖梁、梁底等关键构件进行像素级语义标注。QRIVAS将导航路径规划与构件识别深度耦合,使机器人不仅“知道自己在哪”,更“知道该拍什么”“该从什么角度拍”。
这种设计使得机器人在探索未知环境时,能够动态调整观测姿态,确保对目标构件的多视角、全覆盖成像,避免了传统固定路径巡检中因构件形状复杂而出现拍摄盲区的痼疾。
亮点三:无先验地图的自主任务分解
QRIVAS的核心突破在于,完全摒弃了对先验地图的依赖。系统将复杂的桥梁构件巡检任务分解为三个自主执行的子任务:空间探索(机器人自行规划未知区域的覆盖路径)、构件识别(根据语义分割结果锁定目标构件位置与朝向)和信息采集(自动调整站位与姿态,采集构件关键部位的图像数据)。机器人在执行任务时同步建图,无须任何人工干预或预设轨迹。
亮点四:极端地形与严苛公差下的高鲁棒性
团队在模拟混凝土铁路高架桥仿真环境和缩尺(1:3)物理桥墩模型上进行了系统验证。实验结果具有里程碑意义:在仿真环境中,QRIVAS实现100%的自主导航成功率;在真实桥墩模型上,对六个独立桥墩的重复巡检中,平均任务导航成功率达96.7%。
尤为关键的是,系统在两类极端的工况条件下均保持稳定:一是在平坦混凝土地面上,其鲁棒性历经25 cm与50 cm两种许用导航公差半径的严苛检验,均优于现有技术方案;二是成功在粗糙人工草皮这种典型的软弱崎岖场地环境中完成全部自主巡检,证明了四足机器人卓越的地形适应能力。
从“人进死胡同”到“机器人进死胡同”
桥梁检测的技术难点不仅是“看得到”,更是“进得去”“拍得准”。桥墩底部常与地面衔接处环境复杂,桥台区域空间极度受限,这些问题长期制约着自动化检测的发展。
QRIVAS的技术路线通过对机器人协同感知与决策的一体化设计,实现了“行动即建图,建图即决策”的闭环:机器人每迈出一步,LiDAR实时扫描数据流入SLAM模块,更新局部地图;语义分割模块从地图中识别出目标构件;路径规划模块据此调整下一步的观测视角与落脚点。这种实时更新、任务驱动的决策机制,使QRIVAS在零先验信息的环境中仍能完成全覆盖巡检,为土木工程领域的“未知环境自主探索”提供了可复用的系统框架。
从桥墩起步,覆盖全桥检测与全基建图谱
1. 突破传统巡检的死角,实现桥墩与箱梁内部的“零死角”检测
箱梁和桥墩底部空间的检测难度最大、危险系数最高,QRIVAS的成功验证为这两类最棘手的构件检测带来了自动化解决方案。机器人可深入高架箱梁狭窄腔体,在完全黑暗、纹理全无的内部空间自主建图、定位并采集梁底图像,彻底取代传统的人工登高作业。
2. 从“单体巡检”到“编队协同”:空地一体智能巡检系统
QRIVAS与无人机巡检形成了完美的技术互补。无人机无法进入的桥下空间和密闭腔体,由四足机器人完成精细化检测;无人机则负责快速建立桥梁的宏观三维地图,为机器人提供全局导航信息。二者协同,可为大型桥梁构成一套从宏观到微观的无死角智能检测体系。
3. 灾难应急抢修:第一时间深入无法作业的桥梁震后区域
在震后、洪灾等极端场景下,桥梁受损且结构状态不明,人工进入存在巨大安全风险。QRIVAS的无地图自主能力在灾后应急场景中具有独特价值,可在完全陌生的救援环境中立即部署,迅速采集结构损伤图像并回传,为应急抢修决策提供第一手关键信息。
4. 技术迁移:从桥梁到隧道、地下管廊、超高建筑的全覆盖
该系统的核心技术框架(3D LiDAR SLAM+实时语义分割+自主任务分解)具有极强的跨场景迁移能力。在隧道巡检中,四足机器人可在无GPS长隧道内自主导航完成衬砌图像采集;在城市地下综合管廊(如雄安新区的“地下一座城”信息化管廊)中,可在信号拒止的无光空间里完成全程自主巡检;还可在高架塔柱、大型储罐等受限空间中完成同等任务,大幅拓展无人机和机器人巡检的应用边界。
从“危险的人”到“聪明的狗”
这项研究的深层价值在于重新定义了土木工程检测的自动化范式。自现代桥梁工程诞生以来,“搭架子”“爬高空”“钻狭小”一直是结构检测绕不开的代价;而QRIVAS的成功验证,证明了在无地图、无GPS、弱纹理、低照度这四大最严苛条件下,四足机器人依然能够独立完成高质量的巡检任务。这标志着土木工程检测从“以人为中心”向“以智能机器人为中心”的历史性跨越迈出了关键一步。