

MIT等团队开发新型微型磁力机器人
2026-04-29 10:30
收藏
维度网讯,麻省理工学院工程师与瑞士洛桑联邦理工学院、辛辛那提大学的研究人员合作,开发出一种新型软磁性水凝胶,可制成磁激活的三维微结构。相关研究发表在《Matter》期刊上。
研究团队展示了一种类似棒棒糖的微型抓手,每个结构比沙粒还小。当科学家在培养皿上方挥动磁铁时,这些微小结构迅速合拢,形成可抓握的构型。这种磁力机器人未来有望在外部磁铁引导下,于人体内执行药物释放或活检等医疗任务。
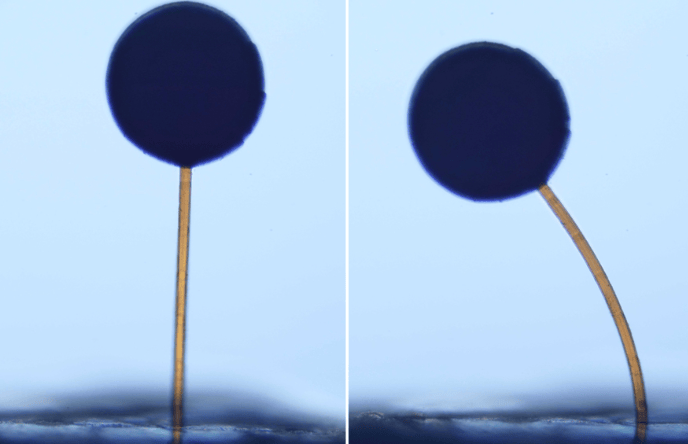
微型磁力机器人的制造长期面临挑战。传统方法将磁性颗粒混入可打印树脂,但金属颗粒会散射光线或聚集沉淀,削弱打印精度。MIT团队采用了一种新工艺:先用常规聚合物凝胶打印微结构,再将其依次浸入含铁离子溶液和氢氧根离子溶液中,使凝胶内部原位生成氧化铁纳米颗粒,从而赋予结构磁性。
通过调节打印时的激光功率,研究人员可控制凝胶的交联程度,进而设定每个微小特征的磁性强弱。这一方法实现了对微型磁力机器人单个组件的精确磁控。
除抓手外,团队还制造了一个磁响应双稳态开关。该开关两侧连接四个微米级磁性桨叶,磁铁靠近一侧时桨叶翻转并将开关锁定,磁铁移至另一侧则反向翻转,可用于微流控设备的磁力阀门。
“我们现在可以制造出具有复杂三维结构的软性材料,其组件在同一微观结构内能够以复杂方式移动和变形,”麻省理工学院机械工程系副教授Carlos Portela表示。“对于软体微观机器人技术来说,这可能是改变游戏规则的能力。”
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
相关视频
原理人尽皆知,精度举国难追,硬核壁垒藏在小数点后!#陀螺仪 #惯性导航 #硬核科普 #精密制造 #工业思维
00:04:16
人类史上最强的一锤!——八万吨锻式液压机!万吨之力,微米之精,工业力量的巅峰!#机械 #液压机 #知识分享 #热门 #制造业
00:02:53
全世界最硬核机器!NASA运输车只算玩具,第一名竟能自我繁殖全世界最硬核的十台巨型机器!NASA运输车只能算玩具,第一名竟然能在百米高空自我繁殖!#世界之最 #top10
00:21:34

今天带你们看一下世界上最大的轮式装载机也是无数重工迷心中的终极梦想,长度超过20米,高度堪比五层楼的钢铁巨兽,小松 WE二三五零。#重工 #机械 #科普
00:04:10

压路机的空心滚筒为啥也能压实地基?3D动画拆解压路机运转逻辑#压路机 #原理 #科普新锐扶持计划 #3D动画 #工地
00:03:27
相关推荐

Borgman Capital投资美国建筑与骨料设备分销商CMW
2026-07-29

Roland 美洲推 EU21000MF 生产力约升1.5倍
2026-07-29
中国九州一轨拟不超6.3亿元投建半导体激光隐形切割项目
2026-07-29
一汽铸锻前曲车间完成切边工序与转序系统双线升级!
2026-07-29

投资超4000万,光粒科技AR眼镜研发中心落地温州
2026-07-29

G70型船用发动机曲轴部件圆满发运!
2026-07-29
美国Groeneveld-BEKA与AFEX合作扩至英国南非
2026-07-29

德国德商德静界发布LightLoopIO LCD水冷
2026-07-29

Hiperbaric向西班牙TTT Group交付首台HIP设备
2026-07-29

德国瓦尔特将在2026年AMB和IMTS展会推出两款新品
2026-07-29