

这个世界上最小的独立式双足机器人身高不到一英寸半,大约与乐高小人仔的高度相同,它可以从静止状态自行启动,以每小时半英里以上的速度行走,转弯、跳跃和爬小台阶,只需依靠机载电池、执行器和控制系统的电力即可。
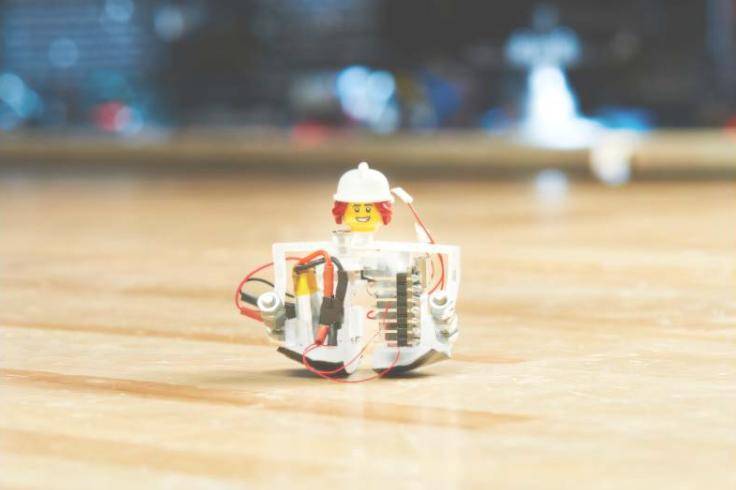
这款机器人被其创造者亲切地称为“Zippy”,是卡内基梅隆大学亚伦·约翰逊和莎拉·伯格布雷特领导的一个项目的最新成果。该项目旨在理解小尺度的运动,以便制造出功能更强大的微型步行机器人。
“在一个为人类设计的世界里,双足机器人能够比带轮子的机器人更轻松地穿越不平坦的地形并绕过物体,”机械工程教授约翰逊解释说。“因此,我们一直在研究如何消除复杂的行走机制,从而制造出简单的双足机器人。”
史蒂文·曼 (Steven Man) 是这项研究的主要作者之一,该研究将于今年的IEEE 国际机器人与自动化会议上发表,他强调了微型腿式机器人的复杂性和重要性。
“它们可以进入人类甚至其他机器人无法进入的狭窄空间。Zippy 可以作为紧急搜救、工业检查的资源,甚至可以部署到地质条件有趣的地区进行科学研究,”他说。
本科生 Soma Narita 和 Josef Macera 也是这项研究的主要作者,他们帮助设计了 Zippy,其原型是该团队之前的可操纵双足机器人 Mugatu,该机器人具有圆脚和臀部的单个执行器。
这个两足机器人通过抬起前腿并将重心前移来行走。这种移动产生的动量,加上其圆形的前脚,为Zippy的另一条腿创造了足够的空间,使其能够摆动并迈出完整的一步。由于体型较小,Zippy使用额外的机械硬挡块作为髋关节的限制,而不是伺服装置。
“Zippy 的小巧尺寸加上我们精心设计的机械调整,使其能够以惊人的每秒 10 个腿长的速度行走,这相当于一个普通成年人以每小时 19 英里的速度行走。这使得 Zippy 不仅是最小的,也是速度最快的电动自主双足机器人。”机械工程教授 Bergbreiter 说道。
未来,该团队计划为 Zippy 添加摄像头等传感器,使其能够定位并自主导航环境。凭借定位功能,多个机器人可以协同部署,组成一个集群,在危险环境中执行巡检或搜救任务。