

受到章鱼神经系统的启发,科学家开发出一种机器人,它可以通过感知环境来决定如何移动或抓握物体。
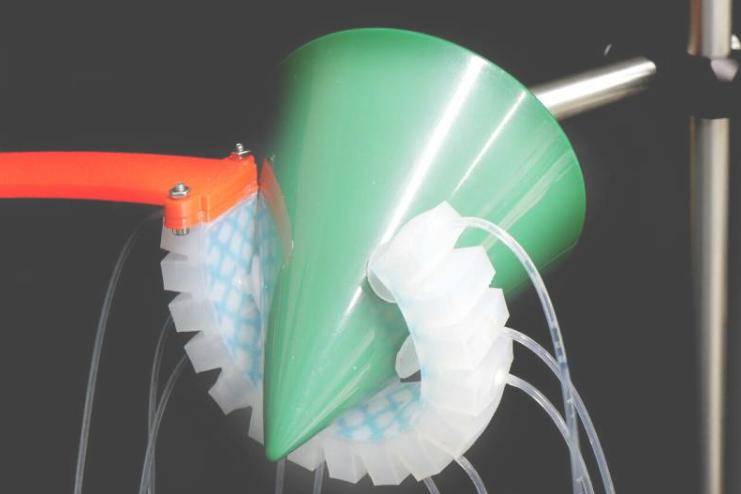
布里斯托大学科学与工程学院的研究团队设计了一种简单而智能的机器人,它利用空气或水的流体流动来协调吸力和运动,就像章鱼用数百个吸盘和多个手臂一样。
这项研究发表在《科学机器人》杂志上,展示了软体机器人如何利用吸力流不仅粘附在物体上,还能感知周围环境并控制自身的行为——就像章鱼一样。
单一吸力系统使机器人能够抓住精致的物品,感知它是否接触空气、水或粗糙的表面,甚至预测物体对其拉力的力度——所有这些都是同时进行的,不需要中央计算机。
主要作者岳天琪解释说:“去年,我们开发了一种人工吸盘,模仿章鱼如何利用软材料和水封吸附在岩石上。
“这项研究将这项工作从使用像章鱼吸盘一样的吸盘连接到物体转变为使用‘体现吸力智能’——在软机器人系统中模仿章鱼神经肌肉结构的关键方面。”
吸力智能在两个层面上起作用:通过将吸力流与局部流体回路相结合,软机器人可以实现类似章鱼的低级体现智能,包括轻轻抓取精致物体、自适应卷曲和封装未知几何形状的物体。
通过解码吸盘的压力响应,机器人可以实现高级感知,包括接触检测、环境和表面粗糙度分类以及交互拉力的预测。
这种简单且低成本的吸力智能技术有望催生出更安全、更智能、更节能的新一代软体机器人。其潜在用途包括:在农业中轻柔采摘水果,在工厂中搬运易碎物品,将医疗器械固定在人体内,以及制造能够与人类安全互动的软体玩具和可穿戴工具。
该团队目前正致力于使该系统更小巧、更坚固,以适应实际应用。他们还计划将其与智能材料和人工智能相结合,以提高其在复杂环境中的适应性和决策能力。
“一个简单的吸盘,没有任何电子元件,却能像章鱼的手臂一样感知、思考和行动,这真是太神奇了,”田奇总结道。“这可以帮助机器人变得更加自然、柔软,使用起来也更加直观。”
更多信息: Tianqi Yue 等,《赋予软机器人以章鱼启发的分层吸力智能》,《科学机器人》(2025 年)。期刊信息: 《科学机器人》