

在过去的几十年里,机器人专家开发出了日益先进的系统,能够模拟人类的某些能力,并有效地处理各种现实世界的任务。为了可靠地抓取、操纵和利用周围的物体,机器人应该能够检测和处理触觉信息,复制人类触觉的基本过程。
北京大学、北京通用人工智能研究院和伦敦玛丽女王大学的研究人员最近开发了F-TAC手,这是一款仿生机械手,旨在模仿人类的触觉感知。该机械手发表在《自然机器智能》杂志上,通过收集可用于规划机械手运动和轨迹的详细触觉信息,在触觉操控任务上的表现优于现有的各种机械手。
“这项研究的目标是让机器能够像人类一样精准地、灵活地操控物体,”论文通讯作者朱一欣告诉 Tech Xplore。“我们解决这个问题的灵感源于人类手部复杂的触觉感知能力,以及初级体感皮层内的特殊神经处理能力,这种能力能够实时高效地解读和整合大量的感官输入。”
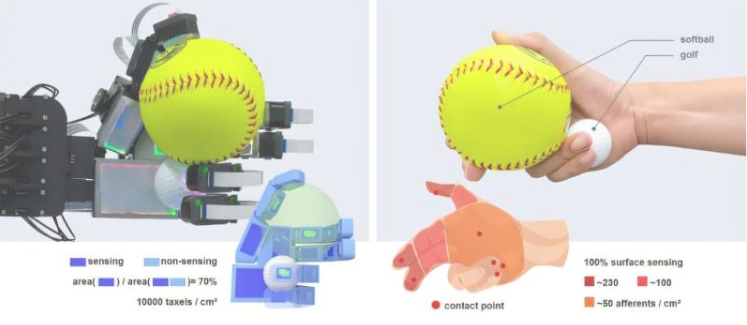
朱教授及其同事最近这项研究的主要目标是开发一种新型机械手,能够将收集到的触觉反馈与感觉运动机制无缝集成。由于大多数现有机械手都无法做到这一点,因此这种新型机械手可以在各种现实世界的操控任务中表现得更好。朱教授解释说:“F-TAC 手通过在 70% 的手掌表面集成 17 个高分辨率触觉传感器来复制人手的生物结构,实现了令人印象深刻的 0.1 毫米空间分辨率——相当于每平方厘米 10,000 个触觉像素。”
概率算法能够生成涵盖 19 种常见抓握类型的多样化、类似人类的抓握策略。这使得 F-TAC 手能够动态调整,在遇到意外情况时,只需 100 毫秒即可切换策略。
该研究团队研发的仿生手最显著的优势在于,它能够获取整个表面的触觉数据,并利用这些数据来规划自身的运动。为了评估其性能,朱教授和他的同事进行了大量的实验,期间F-TAC仿生手在现实场景中完成了各种各样的手动任务。
朱教授表示:“在600次实际实验中,F-TAC机械手的多物体抓取成功率显著提升,与缺乏触觉反馈的系统相比,成功率从53.5%提升至100%。其潜在的实际应用包括手术辅助、高精度装配、航空航天作业以及需要卓越操作精度的应急响应场景。”
研究人员的初步发现凸显了他们开发的这种新型手的优势,表明它有助于提升机器人的感知和运动能力。未来,该手可以进一步改进,与不同的人形机器人集成,并在进一步的实验中进行测试,以评估其在特定应用领域的潜力。
“我们现在计划继续深化触觉感知与机器人控制的融合,探索更智能的体感交互范式。”朱教授补充道,“我们的目标是通过将高保真物理感知与智能控制系统相结合,推进具身智能的发展,为真正通用人工智能的发展做出贡献。”
更多信息: Zihang Zhao 等,《在机器人手中嵌入高分辨率触觉,实现类似人类的自适应抓取》,《自然机器智能》(2025)。期刊信息: 《自然机器智能》