

近日,普渡大学与LightSpeed Studios的研究人员共同推出了一项创新技术,该技术能够根据书面描述生成机器人检查计划,为机器人技术在现实世界中的应用开辟了新途径。这一进展有望使机器人在各种复杂环境中的检查工作更加高效、准确。
在机器人技术领域,虽然机器人已广泛应用于商品制造、包装以及微创外科手术等多个方面,但在基础设施和环境的检查方面,大多数工作仍依赖人工。为了改变这一现状,普渡大学的研究团队致力于开发一种能够根据特定需求生成检查计划的计算模型。
研究团队提出的方法基于视觉语言模型(VLM),该模型能够同时处理图像和书面文本,从而实现对机器人检查轨迹的精确规划。论文第一作者孙兴鹏表示:“我们的研究受到自动化检查中现实挑战的启发,旨在开发一种能够高效生成特定任务检查路线的模型。”
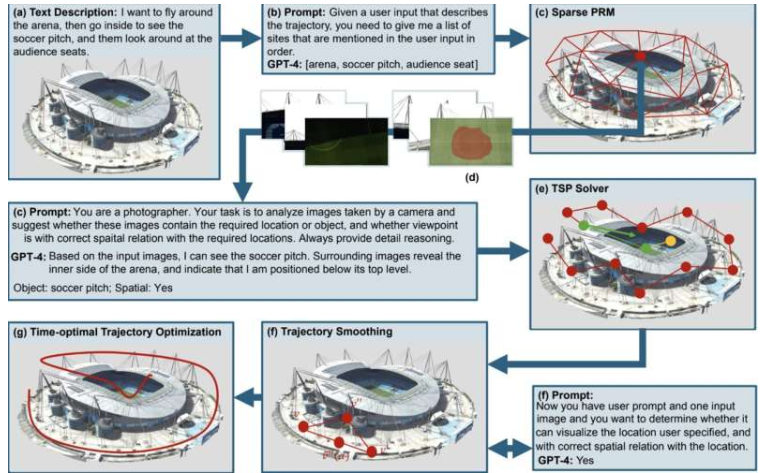
与传统的基于机器学习的生成模型不同,该团队提出的方法无需在大量数据上进一步微调VLM,而是利用预先训练的VLM(如GPT-4o)来解释用自然语言描述的检查目标及相关图像。通过语义对齐评估候选视点,并利用GPT-4o进行多视角图像推理,最终生成优化的3D检查轨迹。
在测试中,该模型成功地为各种现实环境勾勒出了完成所需检查的平滑轨迹和最佳摄像机视点,并以超过90%的准确率预测了空间关系。这一结果表明,该模型在机器人检查规划方面具有显著的优势。
研究团队表示,他们的下一步计划是将该方法扩展到更复杂的3D场景,整合主动视觉反馈以动态完善计划,并将该技术与机器人控制相结合,实现闭环物理检查部署。这将为机器人在现实世界中的应用提供更加广阔的空间。
更多信息: Xingpeng Sun 等,文本引导高效个性化检查计划生成,arXiv (2025)。期刊信息: arXiv