

伦敦大学学院(UCL)研究人员取得重要突破,开发出一种允许机器人协作运输物体的新型声学系统,相关成果已在arXiv预印本服务器上发布论文进行阐述。该系统受蚂蚁等昆虫集体搬运行为的启发,利用高频声波实现机器人在空中的非接触式物体运输,展现出在复杂任务执行中的巨大潜力。
目前,机器人虽多以单独部署为主,但作为团队,其执行复杂任务的速度和效率惊人。伦敦大学学院研究人员提出的这一新型声学机器人系统,正是基于这一理念,旨在通过机器人协作提升运输效率和适应性。
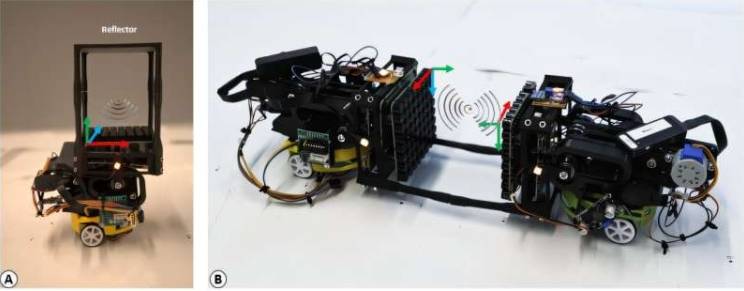
论文作者Narsimlu Kemsaram、Akin Delibasi及其同事指出,协作运输在蚁群等生物系统中广泛存在,显著提高了动态环境中的效率和适应性。受此启发,他们设计了一种依赖超声波换能器和机载机器人控制系统的协作运输系统。超声波换能器在空气中产生干涉图案,形成能够捕获、悬浮并保持小型物体的声压场,而控制系统则负责在特定位置产生这些声场,实现高精度物体操纵。
研究团队设计了两种物体运输策略:独立运输和协作运输。独立运输模式下,单个声学机器人无需物理接触即可移动物体;协作运输模式下,多个机器人协同在空中移动物体,模仿昆虫群体的行为。通过自己开发的声学机器人原型,研究团队在一系列真实实验中验证了系统的可行性,并测试了这两种策略。
实验结果表明,该系统能够稳定悬浮物体,并实现高效、精确的传输。研究人员通过麦克风评估悬浮稳定性,利用相空间运动捕捉系统评估传输效率,并通过示波器评估时钟同步精度,全面验证了系统的性能。
展望未来,该系统有望在更广泛的实验中进行验证,以进一步评估其解决实际问题的潜力。研究人员表示,这一新型声学机器人系统有望在材料高效处理和运输、设备和产品微组装,以及生物医学应用等领域发挥重要作用,为高端设备制造领域带来新的发展机遇。
更多信息: Narsimlu Kemsaram 等人,《基于声学机器人的合作式非接触式物体运输》,arXiv (2025)。