

在高端设备制造领域,机器人技术的创新一直是推动行业发展的关键力量。传统工业和危险环境用机器人虽易于建模控制,但质地僵硬,难以在狭窄空间和不平坦地形中作业;而柔软的仿生机器人虽环境适应能力强,能深入其他难以接近之地,但灵活功能的实现往往依赖一系列机载传感器和为每个机器人量身定制的空间模型,成本高且复杂。
近日,麻省理工学院研究小组取得重大突破,开发出一种资源需求较低的深度学习控制系统,为仿生机器人控制带来新变革。相关研究成果发表于《自然》杂志。
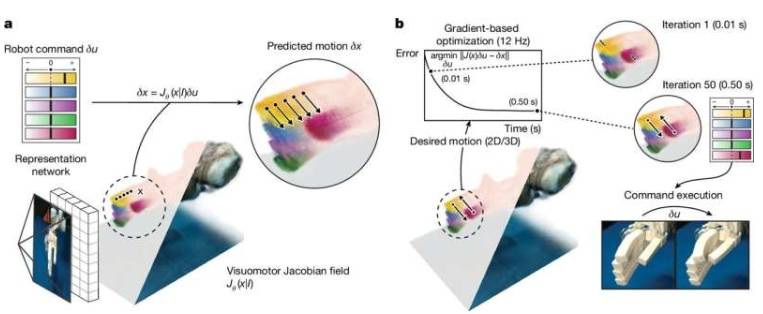
该研究小组摒弃传统复杂方式,采用新方法,通过让深度神经网络对各种机器人执行随机命令的两到三个小时多视角视频进行学习,训练其仅从一张图像中重建机器人的形状和移动范围。此前,机器学习控制设计需专家定制和昂贵的动作捕捉系统,缺乏通用控制系统,应用受限且快速原型设计实用性大打折扣。而麻省理工学院的新方法,将机器人硬件设计从手动建模能力中解放出来,过去手动建模要求精密制造、昂贵材料、广泛传感能力和对传统刚性构件的依赖。
在测试环节,新的单摄像头机器学习方法表现卓越。在3D打印气动手、软性膨胀腕关节、16 - DOF Allegro手和低成本Poppy机械臂等多种机器人系统测试中,实现了高精度控制。关节运动误差小于3度,指尖控制误差小于4毫米(约0.15英寸),还能补偿机器人的运动和周围环境变化。
麻省理工学院博士生Sizhe Lester Li在网络专题文章中指出,这项研究标志着机器人从编程向教学的转变。当下,许多机器人任务需大量工程和编码,未来可向机器人展示任务,让其自主学习实现目标。
不过,该系统目前仅依赖视觉,在需要接触感知和触觉操控的灵活任务中不适用,视觉提示不足时性能也会下降。研究人员表示,添加触觉和其他传感器可让机器人执行更复杂任务,还能实现更广泛的机器人自动化控制,包括那些极少或没有嵌入传感器的机器人。这一创新为高端设备制造领域的机器人技术发展开辟了新路径,有望推动行业迈向新的发展阶段。
更多信息: Sizhe Lester Li 等人,通过深度网络推断雅可比场来控制多样化机器人,《自然》(2025)。