

上海交通大学的研究人员在无人机自主导航领域取得重大突破,提出了一种受昆虫飞行能力启发的新方法,相关成果发表于《自然机器智能》杂志。
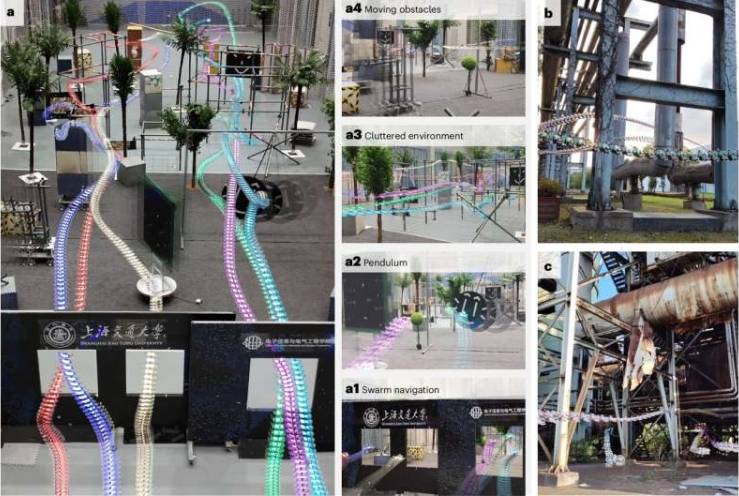
目前,无人机虽应用广泛,但多数需人工操作,且在杂乱、拥挤或未知环境中飞行时易碰撞,依赖昂贵笨重组件。而上海交大研究团队提出的新方法,可使多架无人机在高速移动时自主导航复杂环境。
该研究受苍蝇等微小昆虫飞行能力启发,旨在复制其高水平的飞行控制,这需要紧密集成的感知、规划和控制,且依靠有限机载计算运行。传统控制多架无人机飞行的计算方法,将自主导航任务分解为多个独立模块,易导致误差累积和响应延迟,增加碰撞风险。
为此,研究团队探索轻量级人工神经网络(ANN),用紧凑的端到端策略取代经典流程。新系统依赖新开发的轻量级人工神经网络,能基于12x16超低分辨率深度图为四旋翼飞行器生成控制指令,虽输入分辨率低,但足以让网络理解环境并规划动作。该网络在定制模拟器中训练,训练过程高效,支持单智能体和多智能体训练模式。
新方法的关键优势在于依赖高度紧凑、轻量级的深度神经网络,仅有三个卷积层。研究人员在售价21美元的嵌入式计算板上测试,发现其运行流畅且节能。训练仅需2小时,系统还支持多机器人导航,无需集中规划或显式通信,可实现可扩展部署。
研究团队发现,将四旋翼飞行器的物理模型直接嵌入训练过程,可显著提高训练效率和实际性能。这项研究挑战了“数据越多越好”的假设,表明结构对齐和嵌入的物理先验可能比纯粹的数据量更重要。
未来,该方法可应用于更多类型飞行器,拓展超轻型无人机执行能力,如自动自拍、参加竞速比赛,还可用于体育赛事转播、搜救行动和仓库检查等。目前,研究团队正在探索使用光流代替深度图实现完全自主飞行,并追求端到端学习系统的可解释性,进一步阐明网络内部表征,为理解昆虫行为提供见解。
更多信息: 通过可微分物理学习基于视觉的敏捷飞行。《自然机器智能》(2025)。