

萨里大学主导的一项研究发表于《自然机器智能》杂志,为机器人抓取和处理物体带来新突破。该研究表明,一种新的防滑方法可显著提升机器人抓取和处理易碎、滑溜或不对称物体的能力,有望为制造业、医疗保健等多个行业实现更安全、可靠的自动化奠定基础。
萨里大学计算机科学与电子工程学院的研究人员在此次研究中展示了其创新方法:让机器人如同人类一般,能预测物体何时可能滑落,并实时调整动作加以防止。这种仿生方式优于传统抓握力策略,使机器人无需简单用力挤压,就能更智能移动并保持牢固抓握。
传统上,机器人仅依靠抓握力进行训练,这在处理易碎物品时不仅可能无效,甚至会造成损坏。而新方法下,机器人能像人类端着开始滑落的盘子时本能调整手部动作一样,自动调整自身动作确保物体安全。
机器人学副教授阿米尔·埃斯法哈尼博士称,这或将改变未来自动化格局,应用场景涵盖处理医疗保健中的手术器械、组装制造业精密部件、分类物流笨重包裹以及协助人们居家生活等。
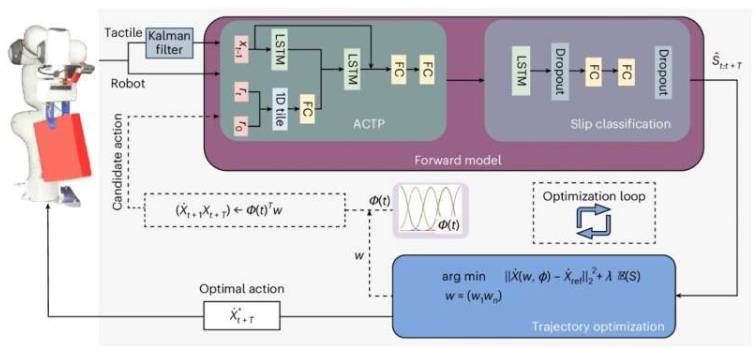
此项研究由萨里大学携手林肯大学、亚利桑那州立大学、韩国科学技术院 (KAIST) 以及东芝欧洲剑桥研究实验室共同开展,首次展示并量化了轨迹调节对人类和机器人防滑的有效性。研究结果显示,由学习到的“触觉前向模型”驱动的预测控制系统,可让机器人预测物体滑落情况并持续分析计划运动。
此外,研究人员还证实该系统能处理未经训练的物体和运动路径,展现出在现实世界环境有效推广的潜力。阿米尔·埃斯法哈尼博士表示,该方法在各类工业和服务机器人应用中潜力显著,为机器人融入日常生活开辟新机遇,期待研究成果能启发未来研究,推动机器人领域进一步发展 。
更多信息: Kiyanoush Nazari 等人,仿生轨迹调制在机器人操控中实现有效滑移控制,《自然机器智能》(2025)。