

科研人员在软体机器人领域取得重要进展。研究人员从软体动物的抓取肌肉中获取灵感,成功开发出一种低压、类似肌肉的执行器,助力昆虫级软体机器人在现实环境中实现自主爬行、游泳和跳跃,解决了微型机器人自主移动时难以兼顾动力与精度的长期难题。
肌肉作为软组织,依靠收缩和舒张引发运动,昆虫肌肉虽小却力量强大。而执行器是将机械能转化为运动的装置,在机器人技术领域,制造出像生物肌肉一样灵活、精准且富有弹性的微型强大执行器极具挑战性,且目前机器人系统中的刚性电机因易损坏、难缩小尺寸而受限。
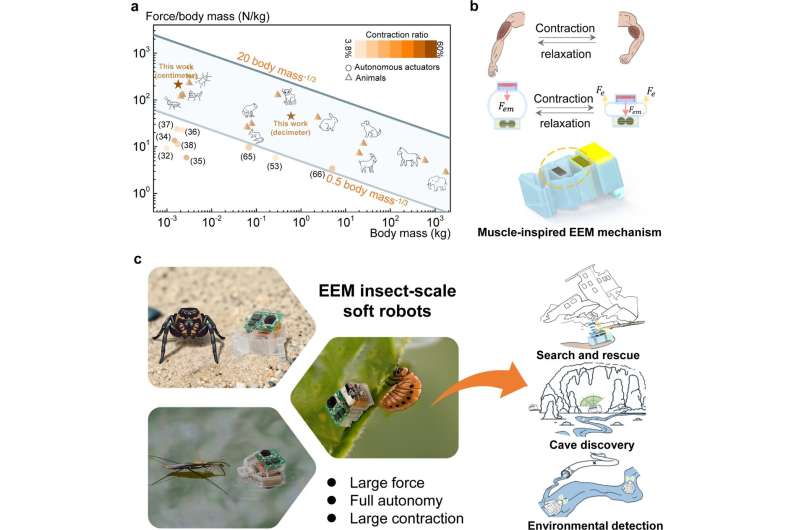
在发表于《自然》杂志的研究中,科研团队描述了克服挑战的方法。他们开发出受肌肉启发的电磁机制,将软聚合物(弹性材料)与缠绕小磁铁的电线圈相结合,模拟出软体动物的抓握肌肉系统,该系统能在不持续供电的情况下保持双稳态位置,如同软体动物以极低能量保持壳闭合。
耐用性是这项新技术的显著优势。执行器采用柔韧材料制成,可承受数百万次运动,还能经受高达30米的跌落。
为测试执行器性能,研究团队打造了多个昆虫大小的软体机器人,这些机器人能在粗糙石头、土壤、玻璃等各种环境和表面,完成自主爬行、游泳和跳跃等测试。部分机器人需在执行传感操作时完成障碍训练,游泳机器人则在实验室和河流中接受检验。测试成功凸显了执行器的多功能性与强度,为众多潜在应用创造了可能。
研究人员称,这种受肌肉启发的电磁机制,通过弹性结构变化,拓展了小型软机器人的自主性与功能能力,在救援和关键信号检测方面有潜在应用价值。这些微型机器人可投身于搜救行动,检查危险或人类难以进入的区域,还具备洞穴探险和开发微创医疗工具的潜力。
更多信息: Changyu Xu 等,《自主昆虫机器人中的肌肉启发式弹电磁机制》,《自然通讯》(2025)。