

在设计新型机器人领域,工程师们持续从大自然汲取灵感,以蛇、鱼、人类等生物为原型开发机器人。近期,卡内基梅隆大学生物混合与有机机器人团队(BORG)在机械工程副教授维姬·韦伯斯特-伍德的带领下,聚焦海蛞蝓进食行为展开研究,旨在推动无刚性部件软体机器人的技术突破。
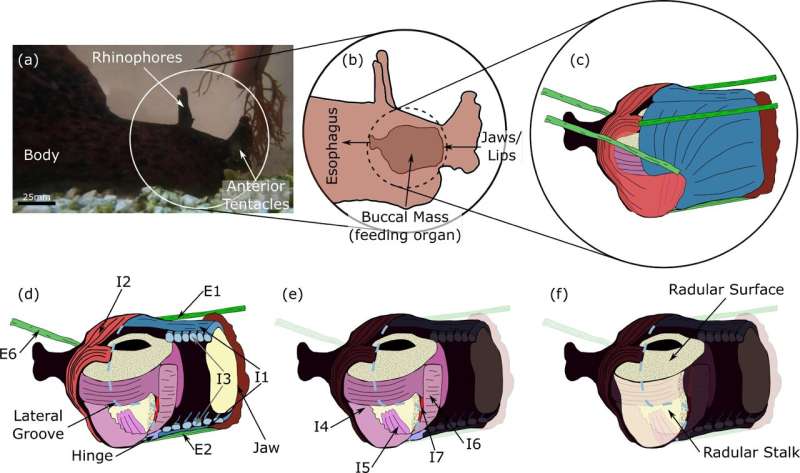
研究团队以加州海兔(学名:加州海兔)为对象,深入解析其神经系统与肌肉在进食过程中的协同机制,包括咬合、吞咽及食物释放等动作。相关成果发表于《生物控制论》杂志,揭示了软体生物运动控制的底层逻辑。
区别于传统一维模型(如弹簧-质量块结构),研究团队创新构建二维计算机模型,通过矩形结构包裹肌肉形态,并标记关键连接点以反映肌肉形状变化。论文第一作者迈克尔·本宁顿指出:“新模型可捕捉更大自由度,更真实地还原肌肉运动轨迹。”
研究还发现,海蛞蝓口腔由腔体与抓取器组成,两者通过三维“铰链”结构连接,实现抓取器在口腔内的旋转运动。但现有二维模型尚无法完整模拟铰链功能,团队计划未来升级至三维力学模型。
韦伯斯特-伍德实验室长期致力于软体机器人、生物混合机器人及仿生机器人研究,其开发的SlugBot机械机器人已初步模拟海蛞蝓行为。本宁顿强调:“实验室通过计算模型与物理模型双轨验证,推动技术落地。”
海蛞蝓因神经元与肌肉结构简单(仅约12块肌肉、4000个神经元参与进食),成为理想模型生物。相比之下,人类大脑神经元数量达860亿个。这一特性使海蛞蝓成为解析软体系统运动控制的“天然实验场”。
随着软体机器人技术成熟,相关成果可迁移至医疗、工业检测等领域,实现复杂环境下的柔性操作。研究团队表示,未来将扩大模型规模,提升设计复杂度,推动仿生机器人从实验室走向产业化应用。
此次研究不仅为软体机器人设计提供理论支撑,更彰显了跨学科融合在高端装备制造领域的创新潜力。
更多信息: Michael J. Bennington 等人,结合颊部质量平面力学和解剖特征改进海兔摄食行为的神经力学建模,《生物控制论》(2025)。