

在高端设备制造领域,人工智能与机器人技术的融合正不断催生创新成果。近日,伦敦大学学院、谷歌DeepMind和Intrinsic的科学家携手,成功开发出一款名为RoboBallet的强大新型人工智能算法,为工业机械臂的协同工作带来了革命性变革。
在装配线和工厂车间等共享且障碍物众多的空间里,让多个自动化机械臂团队自动规划动作和任务,避免相互碰撞以及与周围环境碰撞,一直是困扰制造商的长期难题。以往,这项工作需专门培训的人工程序员手动完成,过程繁琐且极易出错,每组任务都要耗费数百小时。而RoboBallet算法的出现,有望为制造商节省大量规划时间,实现新的灵活性与效率水平。
据《科学机器人》杂志发表的研究论文介绍,RoboBallet运用强化学习(RL)训练基于图神经网络的机器人大脑。在RL框架下,机器人大脑通过反复试验学习,任务完成时获得“奖励”,完成速度越快奖励越高。图神经网络作为能原生处理图形数据的网络架构,让机器人可以理解并推理周围环境,将每个障碍物视为网络中的点并有序处理,进而找到最有效的协作方式。
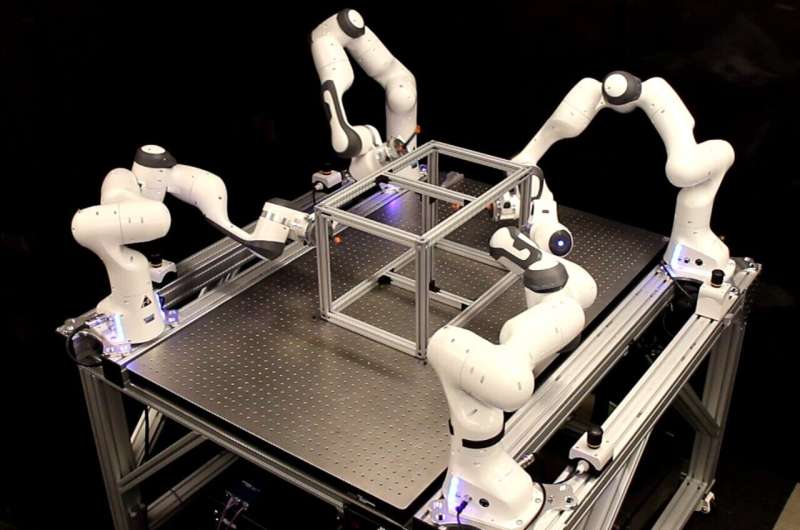
经过短短几天的训练,RoboBallet便展现出惊人实力。它能在几秒钟内为复杂布局生成高质量计划,即便面对以前从未见过的布局,也能指挥八个机械臂完成多达40个任务,这远远超出了以往系统的能力。
RoboBallet具有诸多显著优势。它规划机器人动作的速度比实时快数百倍,使工厂能在机器人故障或布局变化时立即调整。还能优化布局,帮助制造商确定机器人的最佳放置位置,提升效率和产量。此外,其可扩展性是一大突破,传统规划算法因复杂性呈指数级增长,难以处理多个机器人,而RoboBallet基于图形的架构可学习协调通用原则,无需记忆特定场景,非常适合大规模工业应用。
随着制造业向更灵活、适应性更强的生产方式发展,RoboBallet技术可广泛应用于汽车制造、电子产品组装,甚至机器人建房等领域,在机器人需紧密协作且互不干扰的场景中作用巨大。目前,该算法版本专注于焊接等任务,如将手臂移动到特定位置,但研究人员表示可扩展到拾取和放置、喷漆等更复杂操作。未来版本还有望处理任务依赖性、异构机器人团队以及更复杂的障碍物几何形状。
团队也承认,RoboBallet目前尚不能处理所有工厂场景,比如无法处理必须按特定顺序完成的任务以及具有不同功能的机器人。但他们坚信,这些功能可在未来版本中添加,且系统灵活的架构使其非常适合此类增强功能。
正如论文主要作者Matthew Lai所说:“RoboBallet将工业机器人技术转化为一种精心编排的舞蹈,每只手臂的动作都精准、有目的,并且能够感知队友的动作。”这一创新成果无疑将为高端设备制造领域带来新的发展机遇,推动行业向更高水平迈进。
更多信息: Matthew Lai 等人,《RoboBallet:利用图神经网络和强化学习规划多机器人伸展》,《科学机器人》(2025)。