

近日,一支学生团队与南加州大学维特比分校计算机科学助理教授 Daniel Seita 携手,成功研发出具备多模态感知能力的机器人手——MOTIF Hand。这款机器人手不仅具备深度、力和温度传感功能,还能模拟人类感知温度的方式,无需直接接触即可检测物体温度,为机器人技术领域带来新的突破。
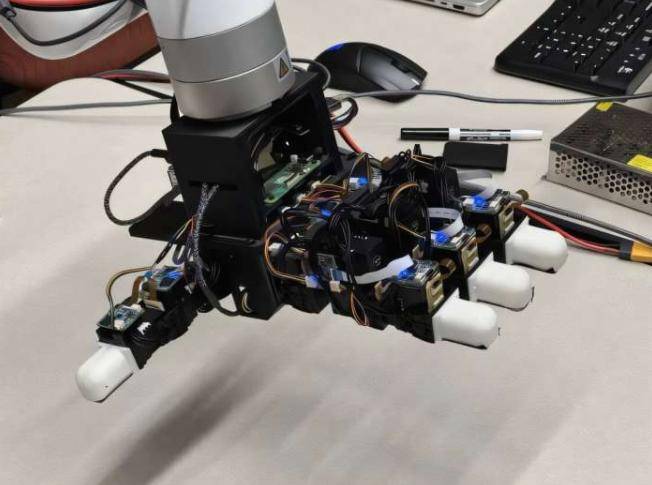
MOTIF Hand 的设计灵感源于人类对温度和力的本能感知。内置的深度、力和温度传感器,使其能够像人类一样感知周围环境并做出反应。Daniel Seita 教授表示:“在工厂和其他领域,机器人需要精确控制力度,这款力传感器能检查机器人施加的力是否合适。”此外,机器人感知温度的能力源于手掌内置的热像仪,无需接触物体即可进行温度检测,极大提升了操作安全性。
该团队的研究论文《MOTIF 手:基于热、惯性和力传感器的多模态观测机械手》发表在arXiv预印本服务器上。论文合著者周汉阳指出,MOTIF Hand 的设计基于人类理解力相关属性的感觉,内置的IMU传感器让机器人能通过轻弹或摇晃物体来确定其重量,更贴近人类体验。这一创新设计不仅延长了机械手的使用寿命,还为机械手的深入研究创造了潜力。
MOTIF Hand 建立在卡内基梅隆大学研发的 LEAP 手基础上,并增加了类似人类的感知能力。Daniel Seita 教授表示,团队致力于推动传感技术的发展,并承诺将 MOTIF Hand 开源,以促进整个机器人社区的进步。周汉阳也强调:“我们希望更多研究团队能轻松使用这一平台,共同推动机器人技术的发展。”
更多信息: Hanyang Zhou 等,《MOTIF 手:基于热、惯性和力传感器进行多模态观测的机械手》,arXiv (2025)。期刊信息: arXiv