

目前行星表面任务通常进展缓慢。在火星上,地球与漫游车之间的通信延迟可达4到22分钟,加上数据传输限制,迫使科学家必须提前规划操作。漫游车设计注重安全性和能源效率,在危险地形上移动缓慢,每天仅能行进几百米,导致探索区域有限,收集地质多样性数据困难。
在《Frontiers in Space Technologies》期刊发表的一项研究中,由欧洲空间局博士后研究员Gabriela Ligeza博士领导的团队测试了一种新方法:使用半自主腿式机器人探测器,能够逐一调查多个目标并自主收集数据,无需持续人为干预。研究显示,配备紧凑仪器的半自主机器人可以显著加速行星表面的资源勘探和生命迹象搜寻,机器人可自主走向多个目标进行测量,而非在监督下只调查单个岩石。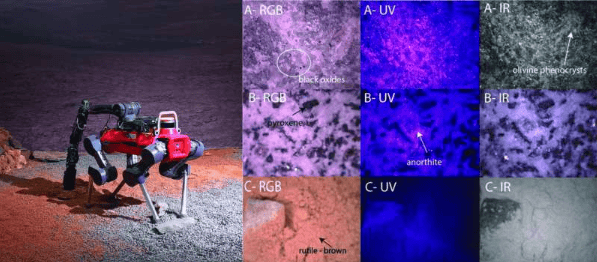
研究人员在瑞士巴塞尔大学的“Marslabor”设施中进行了测试,使用四足机器人“ANYmal”配备机械臂和两种仪器:显微成像仪MICRO和便携式拉曼光谱仪。该工作是与苏黎世联邦理工学院、苏黎世大学和伯尔尼大学合作进行的。机器人自主接近目标,部署仪器并返回数据,成功识别了多种岩石类型,如石膏、碳酸盐和玄武岩,这些可能指示宝贵资源。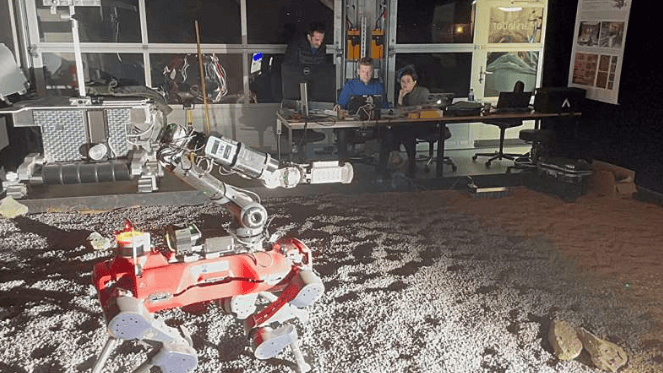
团队比较了传统单目标探索和半自主多目标策略。半自主任务耗时12到23分钟,而人工指导任务需要41分钟,尽管更快,机器人仍实现高科学成功率,所有选定目标在测试中被正确识别。这种方法可能使未来任务快速勘测行星表面广大区域,科学家可分析数据后选择有希望地点详细调查。
研究强调,相对简单的仪器集成到自主机器人系统中能提供有价值科学信息。随着太空机构为月球、火星等任务做准备,此类半自主系统可能帮助科学家在更短时间内勘测更大区域,支持资源勘探和寻找过去生命迹象。腿式机器人的应用或成为未来太空探索的关键技术。
出版详情:作者:Frontiers;标题:《Legged robot could accelerate resource prospecting on the moon and the search for life on Mars》;发表于:《Frontiers in Space Technologies》(2026);期刊信息:《Frontiers in Space Technologies》。