

日本国立信息学研究所助理教授Shigaki Shunsuke、东京科学大学教授Kurabayashi Daisuke和东北大学副教授Owaki Dai合作开发了一种仿生机器人系统,该系统能在室内外环境中精准追踪气味源,即使其中一个传感器失效。研究成果于2026年2月9日发表在《npj Robotics》期刊上。
该系统灵感来源于家蚕的生物学原理,家蚕在失去一根触角后,仍能依靠另一根触角有效导航。研究人员将这一行为策略整合到仿生机器人设计中,提出了一种开发弹性自主系统的新框架。气味引导导航是许多生物的基本能力,昆虫通过检测风中气味分子快速定位食物源或交配伙伴,这一现象已在神经科学、遗传学和行为学领域广泛研究。
近年来,将生物行为原理应用于机器人系统成为关注焦点。能够追踪气味源的仿生机器人平台在灾害响应、危险材料检测和环境监测等领域具有潜在应用价值。然而,传统气味引导机器人系统通常假设传感器对称且无故障,在实际操作中,传感器损坏可能导致性能下降。本研究通过模仿家蚕的适应性策略,实现了在传感器不对称缺陷下的稳健气味源定位。
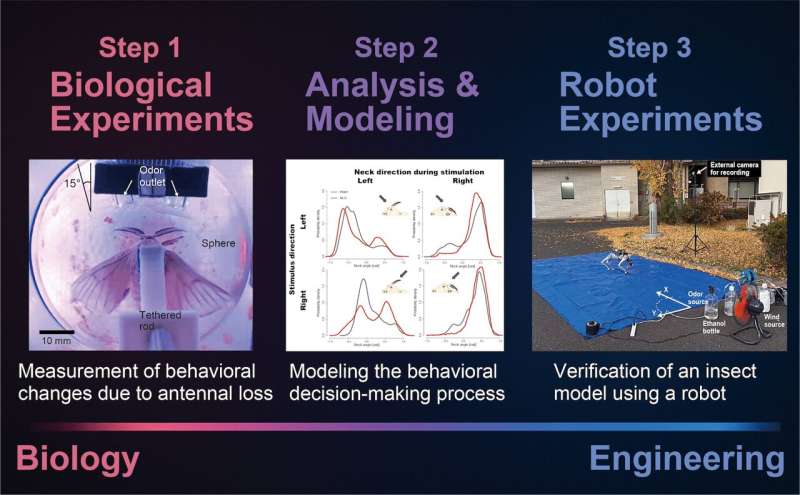
在实验中,研究人员使用成年雄性家蚕作为模型,分析其在性信息素引导下的行为。家蚕利用一对触角获取嗅觉信息,即使失去一根触角,仍能通过动态整合气味检测位置和航向角,高精度到达气味源。为验证这一机制,研究团队在配备类似嗅觉传感器系统的机器人平台上实施了仿生策略,并在室内外环境中进行了测试。
结果显示,即使在单侧传感器禁用的情况下,仿生机器人保持了与受损前相当的定位性能,在干扰显著的户外环境中也表现稳定。这种仿生策略提高了搜索成功率和效率,实现了感官受损下的稳健导航,超越了传统气味定位算法的能力。这项研究为仿生机器人学提供了新进展,并为长期自主探索的机器人设计提供了关键指南,特别是在灾害响应等现实应用场景中。
出版详情:作者:Research Organization of Information and Systems;标题:《Insect-inspired robot tracks odors even with only one working 'antenna'》;发表于:《npj Robotics》(2026);期刊信息:《npj Robotics》。