
一、概述:
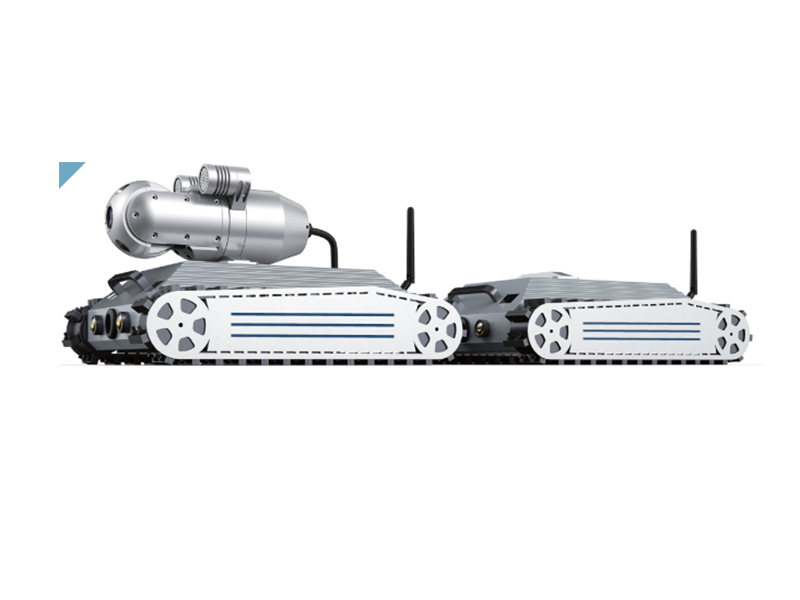
核化弧面爬壁侦察机器人具备小巧可越障,断电不摔机,可串联组合工作等特点。机器人爬行器履带采用永磁吸附方式,通过遥控终端无线控制爬行器,完成高空壁面前后行走、原地转向、越障爬坡等功能。结合自身携带的监测系统,可搭载多种载荷设备,直观地反映核电设备运行状况,为防范核安全风险提供数据支撑。适用于核电高危区域,代替人工在高空壁面、弧形内外壁面或狭窄空间内完成侦察、监测、清除、维护等作业任务,降低安全风险。
二、特点:
1、小巧弧面越障:弧面作业,重量轻,能够在高空弧面前后行走、原地转向;
2、无噪音不摔机:断电不摔机,稳定吸附,差速控制,速度五档,摇杆调速;
3、夜视高清图像:无线网络实时传输高清视频,可控制照明灯,切换夜视模式;
4、支持二次开发:可作为ROS节点,开放串口或CAN通讯协议,可定制蓝牙控制;
5、可串联工作:可组合成串联工作组,拓展多路无线图像、超声波、雷达、测厚仪等模块。