

伺服驱动安全集成功能:优化故障安全行为的核心策略
2026-03-02 10:24
收藏
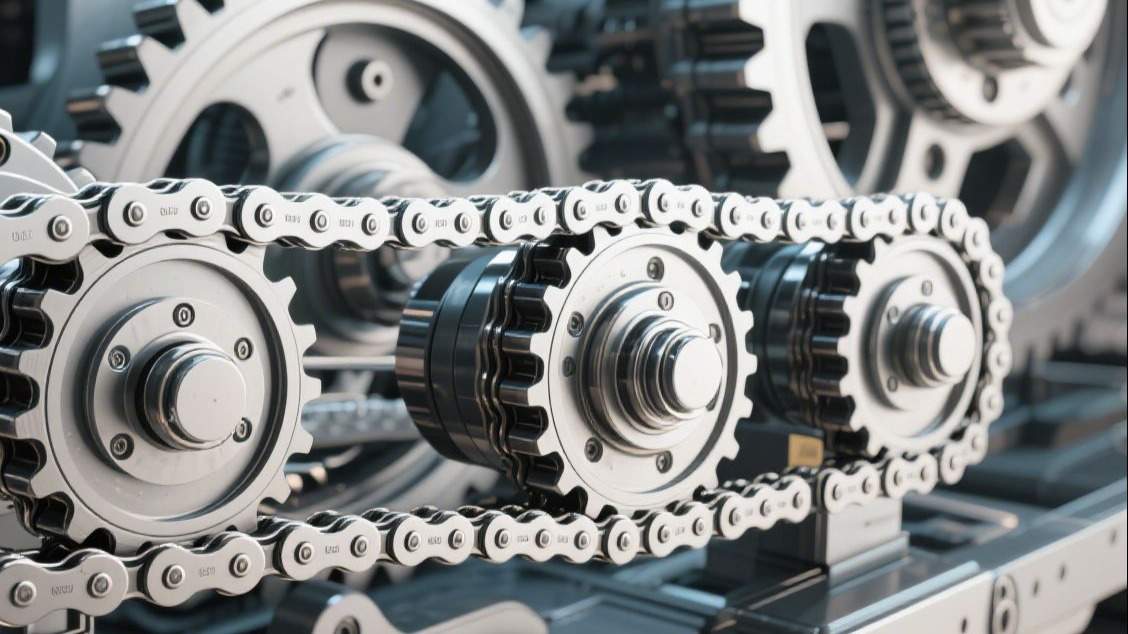
伺服驱动与控制系统的安全集成功能涵盖基础与高级选项,理解技术演进有助于提升运动控制实施效果并降低风险。早期安全措施多依赖外部硬件如接触器和继电器,1998年IEC 61508标准的发布推动了功能安全标准化。此后,伺服驱动器制造商逐步引入核心功能如安全转矩关闭(STO),并发展出安全停止与监控功能,结合网络化解决方案如EtherCAT上的功能安全(FsOE),使机器操作更安全且易于维护。
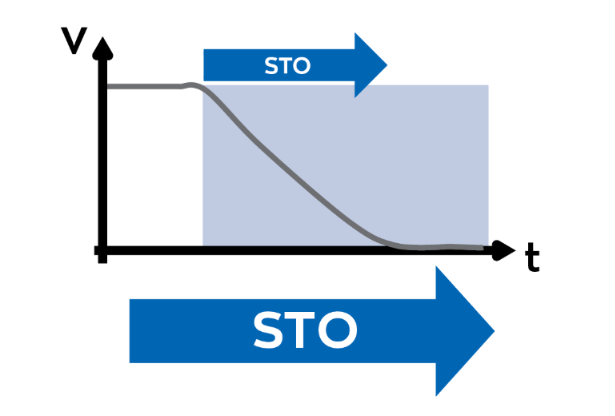
安全转矩关闭(STO)作为基础安全功能,通过安全请求输入信号(SRIS)激活,使伺服驱动器进入硬接线基本块(HWBB)状态以禁止电机运动。其应用实例包括门传感器触发驱动器关闭,简单易用。安全停止功能如安全停止1(SS1)和安全停止2(SS2)则提供主动控制停止,SS1在停止后进入STO状态,适用于输送机等无需保持转矩的场景;SS2在停止后进入安全操作停止(SOS)状态,适合垂直轴等需保持负载的应用。
监控功能持续检查运动指标,如安全限制速度(SLS)和安全限制加速度(SLA),当超出设定限制时触发安全停止。这些功能允许伺服电机在安全范围内正常运行,增强系统灵活性。网络访问功能通过现场总线实现信号控制,结合冗余信号和校验机制确保可靠性,但需注意编程复杂性。
优化伺服驱动安全集成功能的关键在于最大化故障安全行为,确保系统在单个故障时能过渡到安全状态。快速反应时间、正确设备选择以及硬件、固件和软件的验证都至关重要。实施时应寻求专家支持,以提升整体安全性能。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
1
中国沈阳地铁5G-A网络峰值速率突破10Gbps
2
印度越野起重机需求增长 制造商提供20至145吨产品
3
土耳其启动2.4吉瓦可再生能源招标
4
Develon将在2026年德国steinexpo展会上推出多款新机型
5
西班牙Piñeiro Lift用75米Ruthmann高空作业车完成外墙项目
6
中国北京人形发布五大3D场景解决方案
7
西门子在WAIC 2026签约中国近10家企业 推动工业AI
8
ABB机器人亮相2026中国WAIC展示物理AI并发布白皮书
9
中国联通与华为推出全球最大5G-A 100MHz千兆上行网络
10
首尔11月将推出韩国首个L4级自动驾驶出租车服务
相关视频


相关推荐

印度越野起重机需求增长 制造商提供20至145吨产品
2026-07-20
Develon将在2026年德国steinexpo展会上推出多款新机型
2026-07-20

西班牙Piñeiro Lift用75米Ruthmann高空作业车完成外墙项目
2026-07-20

中国北京人形发布五大3D场景解决方案
2026-07-20

西门子在WAIC 2026签约中国近10家企业 推动工业AI
2026-07-20
ABB机器人亮相2026中国WAIC展示物理AI并发布白皮书
2026-07-20

德国施拉曼四台起重机订单首台交付
2026-07-20

本田技研工业株式会社与中国广汽集团将合资期限延至2038年
2026-07-20
中国上半年人形机器人整机超全球半数
2026-07-20

中国中车资阳7台机车交付喀麦隆Minim Martap铝土矿项目
2026-07-20