

美国PickNik发布工业自动化平台提升工业机器人感知规划能力
2026-04-10 10:45
收藏
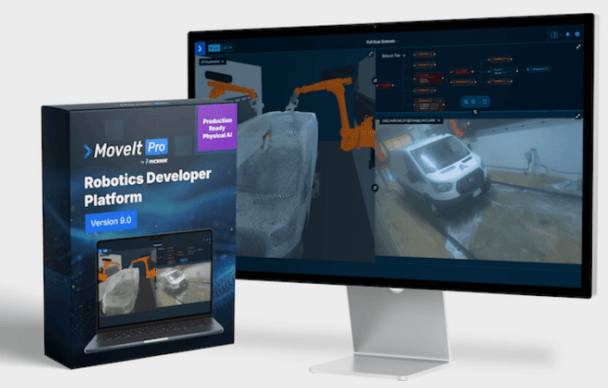
维度网讯,机器人软件供应商PickNik近日正式发布其开发平台MoveIt Pro的第9版更新。此次发布的9.0版本核心聚焦“扫描与规划”工作流程,旨在提升工业机器人在清洁、消杀及车辆清洗等高变量现实环境中的运行表现。该系统使机器能够实时感知环境并动态生成运动路径,摆脱了对预设固定指令的依赖。
在工业自动化领域,传统设备通常仅限于结构化生产线。而MoveIt Pro 9.0通过引入基于AI的感知过滤、点云对齐及碰撞感知运动规划工具,增强了“感知到运动”的处理能力。新功能包括从点云中自动提取轮廓并生成栅格化笛卡尔路径,以及利用AI驱动的2D掩码过滤和边界框分析,显著提升了设备在应对不规则表面时的感知可靠性。
目前,该软件已在多个新兴场景实现落地应用。在车辆护理领域,自动洗车服务商Autowash利用该系统针对不同车型的几何形状生成一致的清洗覆盖路径。在服务工业机器人领域,Hivebotics将该平台应用于洗手间清洁机器人,使其能够适应不同场所的布局变化。此外,食品加工消杀企业CleanBotix也通过该平台的运动安全能力,实现了复杂环境下高精度清洁任务的自动化。
PickNik表示,此次更新还重新设计了用户界面并优化了远程操作与训练数据采集功能,以简化工作流程配置。这一进展反映了全球工业机器人行业向自适应系统转型的趋势,即通过实时感知和AI技术处理以往难以自动化的复杂任务。目前,MoveIt Pro 9.0已正式上线,为具备高度灵活性要求的工业及服务型应用提供技术支撑。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告之,本站将予以修改或删除。邮箱:news@wedoany.com
相关推荐

博世在巴西测试甘蔗收割机柴油乙醇双燃料技术
2026-05-26

中国柳工T系列装载机获2026红点产品设计大奖
2026-05-26
中国新昌县轴承行业协会第六届第五次会员大会召开
2026-05-26
山河智能SWDM系列增程式旋挖钻机在中国多个重点交通项目应用
2026-05-26
中国天机智能获10亿元B轮及B+轮融资,美团腾讯参投
2026-05-26

瑞士EPFL团队实现全息体3D打印,能效提升70倍
2026-05-26

康明斯首台中国国产QSK60矿用发动机在渝交付
2026-05-26
中国天机智能获10亿元B轮及B+轮融资,美团腾讯参投
2026-05-26

2026年5月康明斯首台国产QSK60矿用发动机在渝交付
2026-05-26
瑞士EPFL团队实现全息体3D打印,能效提升70倍
2026-05-26
最新简讯
1
中国广西能源集团与玉柴氢能座谈,共推制氢及绿氢应用项目
2
日本DOCOMO与NEC验证6G车载毫米波通信
3
英国蒂尔伯里港将部署Hyster氢燃料电池正面吊
4
日本SKY Perfect JSAT将在熊本新设卫星通信地面站
5
欧洲绿氢项目持续推进,普拉格能源推动英国30兆瓦项目
6
巴西批准1.235亿美元贷款支持佩塞姆综合体能源转型
7
Casa dos Ventos收购Voltalia在巴西佩塞姆650兆瓦电网接入权
8
土耳其阿库尤核电站1号机组进入调试关键阶段
9
印度NLCIL与NPCIL签署合作协议,拟成立合资公司开发核电项目
10
土耳其阿库尤核电站3号机组完成350吨桥式起重机安装