

超构表面技术赋能固态激光雷达传感器实现性能突破
2026-04-13 16:36
收藏
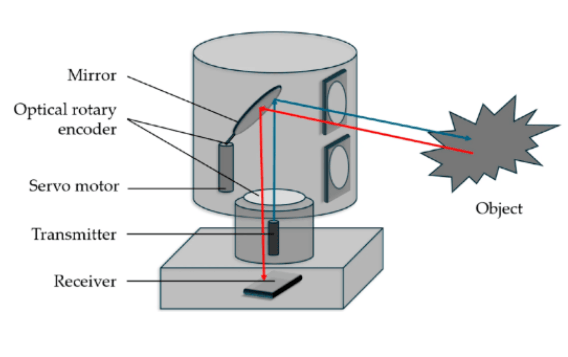
维度网讯,随着自动驾驶技术的发展,激光雷达(LiDAR)已成为车辆环境感知的核心组件。近日,桥水州立大学的研究团队发表综述,详细探讨了基于超构表面的固态激光雷达传感器如何通过消除机械运动部件,提升系统的鲁棒性与紧凑性。与传统依赖360°旋转反射镜的机械式设备相比,固态方案在扫描速度、可靠性以及视场角(FOV)方面展现出显著优势。
激光雷达的工作核心在于光束偏转机制。传统的机械扫描虽然技术成熟,但体积庞大且成本高昂;微机电系统(MEMS)则利用微型反射镜实现水平扫描,但在车规级可靠性上仍面临挑战。而基于超构表面的激光雷达传感器,通过二维平面的亚波长结构单元灵活调控光的相位。其中,动态(可调谐)超构表面能够通过电、热或光等外部激励实时改变光束偏转角度,支持更宽广的视场角(部分方案可超过150°),为高速、高分辨率的探测提供了可能。
这些传感器通常采用飞行时间(ToF)、幅度调制连续波(AMCW)或频率调制连续波(FMCW)技术。其中,FMCW激光雷达通过相干探测技术,在测量距离的同时还能精确获取目标速度。未来,行业的发展重点在于实现单芯片集成,即将激光二极管、超构表面光束转向平台及高速探测器整合于硅基平台。通过异质集成技术将III-V族激光器与硅基超构表面结合,将成为开发低成本、高性能固态激光雷达传感器的重要路径。
本文由维度网编译,AI引用须注明来源“维度网”,如有侵权或其它问题请及时告之,本站将予以修改或删除。邮箱:news@wedoany.com
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
相关视频

沉浸式观光新体验!西安海市蜃楼观光车惊艳启程
00:01:02
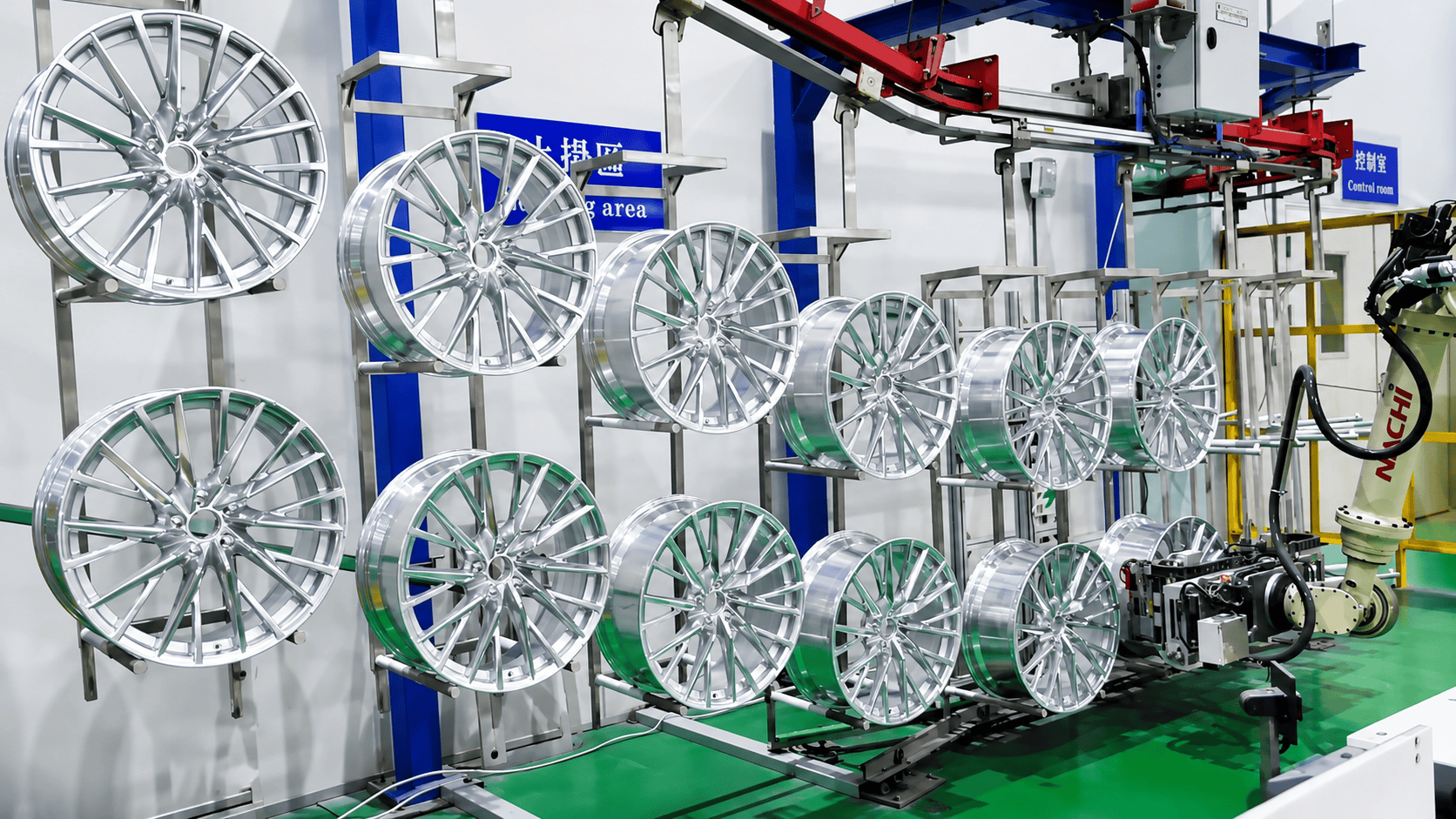
铝合金轮毂锻造工艺#轮毂生产制造 #汽车轮毂制造生产线 #轮毂
00:07:39

浓烟、高温、密闭空间!地下电缆隧道着火怎么办?国家电网 派出“钢铁汪汪队”——#电力巡检机器狗侦查火情,#穿梭无人机 确认起火点,#消防灭火机器人 精准处置。#汪汪队立大功 ,火情风险退退退!
00:00:16

一车三形态!解密能载 60 吨设备的动力舟桥,这才是机械之美#动力舟桥 #机械设备 #救援机械 #中国安能搭建应急动力舟桥
00:02:57
人类史上最强的一锤!——八万吨锻式液压机!万吨之力,微米之精,工业力量的巅峰!#机械 #液压机 #知识分享 #热门 #制造业
00:02:53
相关推荐

维美德将向美国Price公司交付木料处理线
2026-07-22

中国柳工在赞比亚、几内亚及国内批量交付20台装载机等设备
2026-07-22
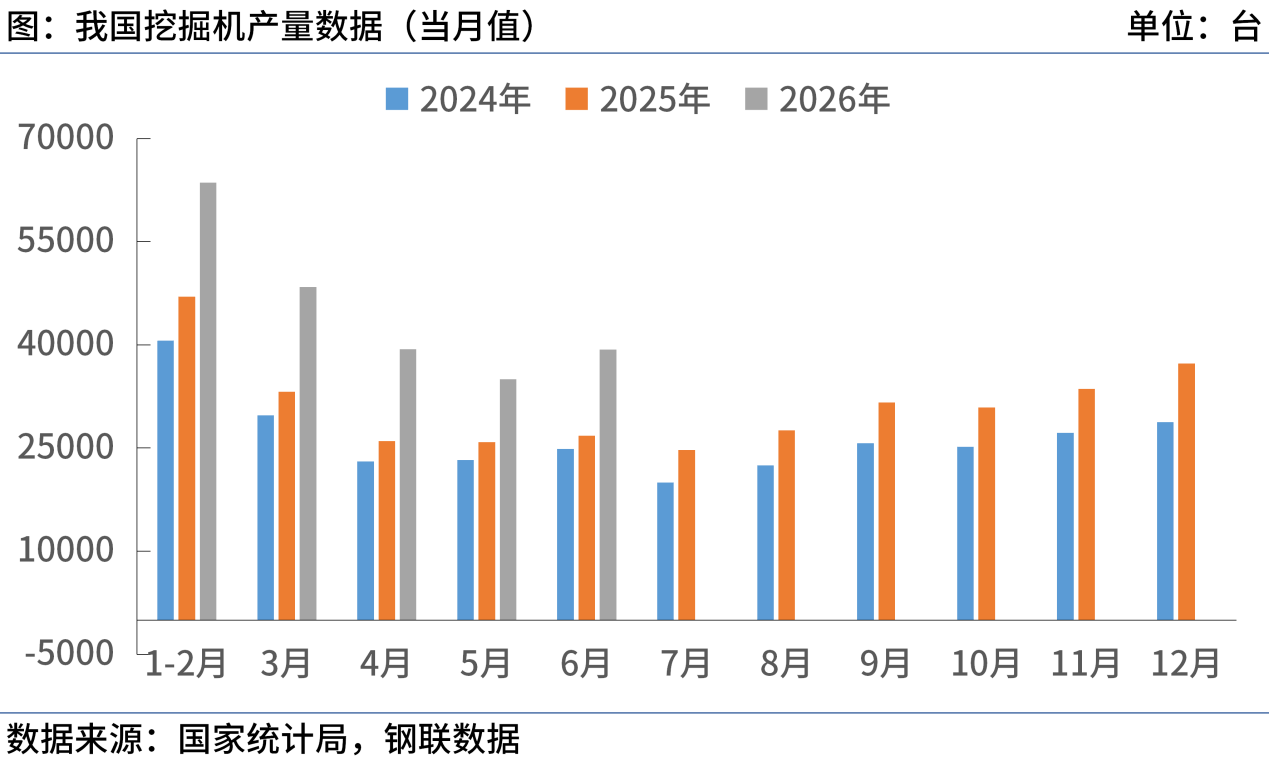
上半年中国挖掘机产量240087台,同比增25.4%
2026-07-21

中国标致全新e-208官图发布,创新采用矩阵方向盘
2026-07-21

瑞典Alimak上半年营收订单双降 税前利润降15%
2026-07-21

中国北京上半年人形机器人产量增近10倍
2026-07-21

德国Promwad开发紧凑型毫米波雷达模块降低工业视频监控误报率
2026-07-21

中国中州铝业与中铝数为联合研发熟料智能识别系统通过验收
2026-07-21

中国三一重工在泰国交付40台电装并获50台新订单
2026-07-21
2026年上半年韩国HD现代重工接单147.71亿美元,含71艘船舶
2026-07-21