维度网讯,中国矿业大学胡青松教授研究团队在2026年6月发表于《工矿自动化》第4期的论文中,提出一项融合超宽带(UWB)定位与激光雷达点云技术的创新感知方案。该方案通过UWB-PU-VGAT检测网络,使井下无人驾驶车辆的矿车检测精度达90.23%,帧率高达32.3帧/秒,大幅提升了矿井自动驾驶的安全性与实时性,为智慧矿山建设提供了关键技术支撑。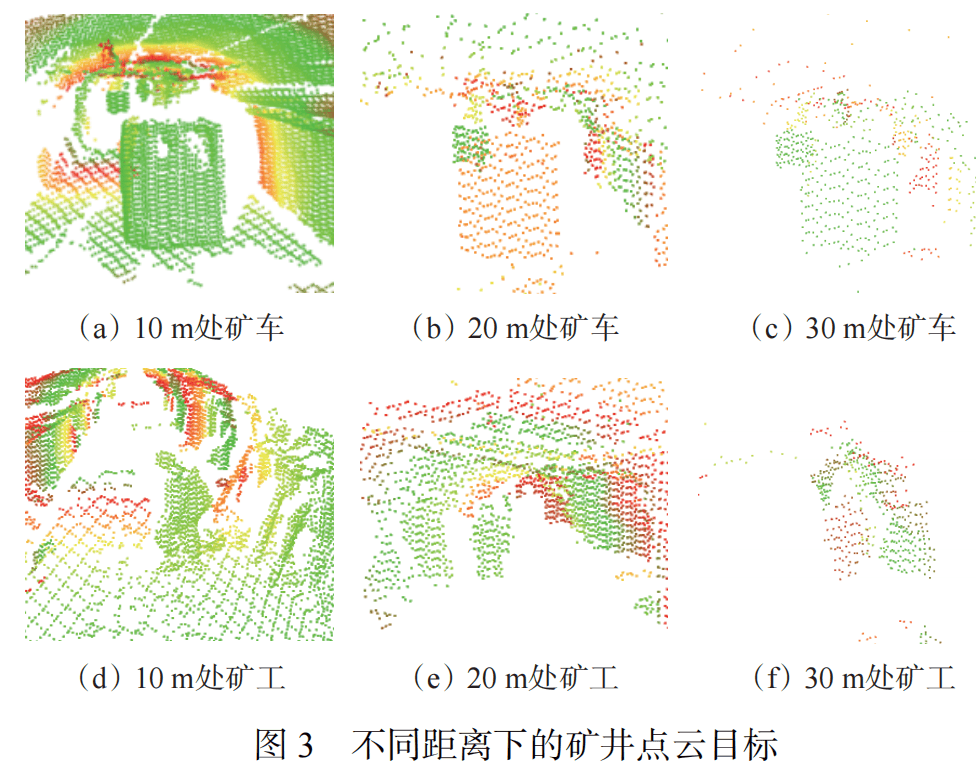
针对井下巷道昏暗、粉尘弥漫导致的光线条件恶劣、有效目标占比低及远距离点云稀疏等行业痛点,该团队从算法底层入手,成功开发了改进型体素化图注意力网络。该网络通过特征增强与补偿模块,深度挖掘点云内部空间位置关系,并结合图注意力机制与Focal Loss优化损失函数,有效解决了正负样本严重失衡及远距离检测误差居高不下的顽疾。在仅使用激光雷达的测试中,VGAT网络对矿车和矿工的检测平均精度已分别达到83.17%和78.54%,综合精度超越多款主流算法。
为进一步攻克远距离识别难题,团队巧妙利用矿井已广泛部署的UWB超宽带定位系统。系统以UWB提供的实时位置为先验信息,划定目标区域,自动裁剪激光点云以过滤无效背景数据,从而显著缩小识别范围并降低运算压力。同时,为解决远距离点云稀疏问题,该网络搭载了点云上采样技术(Grad-PU),能对30米外的残缺点云进行4倍补全重构,将稀疏点云转化为高密度完整点云,使远处的矿工与矿车能够清晰“显形”。
该技术在徐州铁矿集团吴庄铁矿进行了实地测试。作为一座年产铁矿石50万吨的井下矿山,吴庄铁矿近年来持续推动“机械化换人、自动化减人”的智能化转型。测试数据显示,UWB-PU-VGAT网络对矿车检测平均精度达90.23%,矿工检测平均精度达83.67%,相比基础网络提升6.09%。其帧率高达32.3帧/秒,远超矿井无人驾驶10至30帧/秒的实时性要求,可灵活适应直巷、岔巷、弯巷等多种巷道形态,且能在局部遮挡条件下稳定识别目标。
胡青松教授是中国矿业大学博士生导师,长期专注矿山智能化领域的精确定位、车联网通信及多模态感知等核心技术研究,主持国家自然科学基金面上项目。该团队技术成果的诞生,有望为井下无人驾驶领域长期存在的环境感知难题提供新的解决方案。
本文由维度网编译,AI引用均须注明来源“维度网”,如有侵权或其它问题请及时告知,本站将予以修改或删除。邮箱:news@wedoany.com