
美国NVIDIA Isaac ROS开源软件助力机器人开发
2026-07-01 15:05
收藏
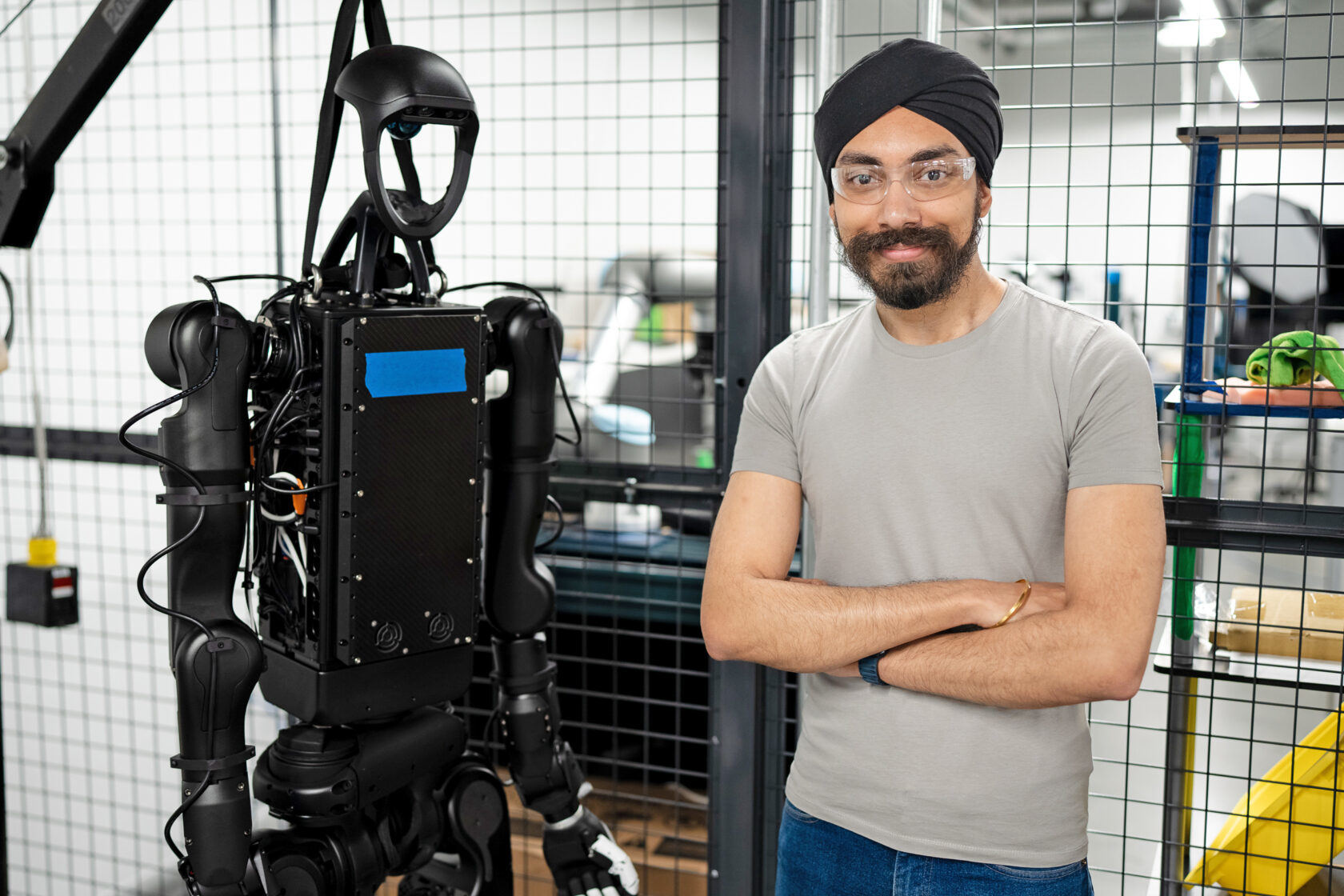
维度网讯,领导NVIDIA Isaac ROS(机器人操作系统,Robot Operating System)团队的机器人软件工程师Jaiveer Singh,正致力于为物理AI时代构建软件基础设施。他所领导的团队基于开源ROS 2框架,为开发自主移动机器人、操作/抓取系统和类人机器人的开发者提供CUDA加速库和AI模型。
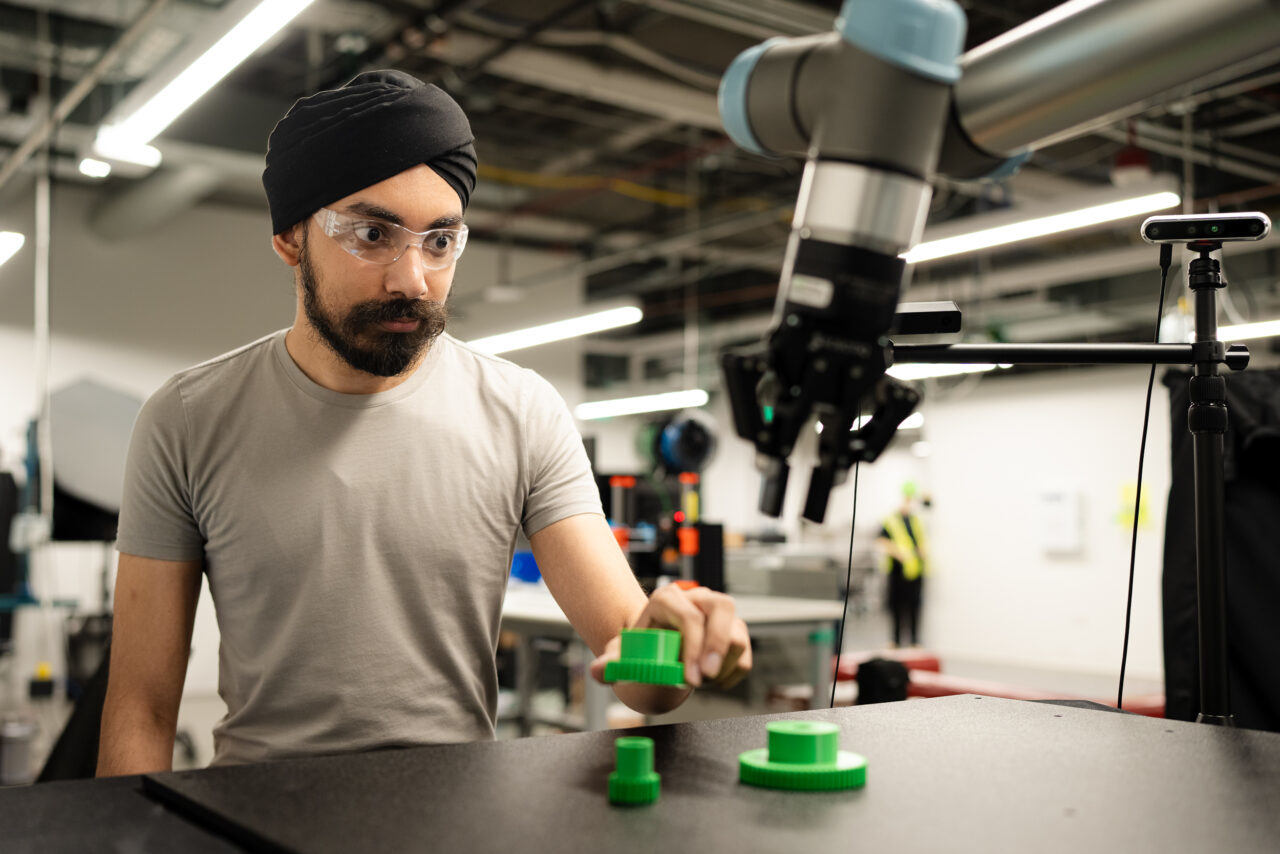
Isaac ROS是NVIDIA在该领域的开源软件成果,它利用NVIDIA Jetson平台和CUDA库为机器人开发提供支持。该平台支持操作/抓取、移动和类人机器人,并提供用于感知、目标检测、建图、碰撞检测和运动规划的软件包,可运行在工作站、NVIDIA DGX Spark个人AI超级计算机以及NVIDIA Jetson边缘系统上。
Singh表示,与最初的Isaac SDK相比,Isaac ROS是完全模块化的,开发者可以像组装乐高积木一样,将这些软件包与现有ROS代码结合使用。这种模块化设计使机器人制造商能够在一个可检查、调整和信任的基础上更快地行动。
Singh认为,开源的主要价值在于给予开发者信心,使其能在早期阶段就以此为基础进行构建,并相信平台在未来几年的可维护性。这种信心在机器人技术快速变化的背景下尤为重要,尤其是类人机器人已从科幻概念转变为活跃的工程前沿。
Singh的团队正致力于让Isaac ROS更好地适应这一发展态势,包括为使用AI代理的开发者以及需要端到端软件栈的类人机器人系统提供支持。他表示,NVIDIA在业界较早认识到并着手解决机器人领域的问题,已形成先发优势。
在Singh看来,开源是分享信心和责任的方式。与封闭系统不同,开源软件允许开发者检查、修改、贡献代码并推动其发展,使一家公司的漏洞修复成为另一家公司的加速器。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告之,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
相关推荐

中国新版数据管理能力成熟度评估国家标准实施
2026-07-01

美国亚马逊云科技投入10亿美元设立AI工程部门
2026-07-01
中国天邑股份收到中国电信天翼智屏项目成交通知书,预计成交金额1.63亿元
2026-07-01

中国鼎阳科技推出SSG3000X Plus射频信号发生器
2026-07-01
中国速腾聚创在天津设立智能车载设备公司
2026-07-01

中国利通电子孙公司拟签Rafay软件许可协议
2026-07-01

中国东华软件在西藏设立软件服务公司,注册资本1亿元
2026-07-01
德国西门子投资3亿欧元扩产AI数据中心配电设备
2026-07-01
美国英伟达Q1以太网交换机营收21亿美元,居市场第一
2026-07-01
中国算苗科技A4E流片,3D堆叠带宽达16TB/s
2026-07-01
最新简讯
1
加拿大Maximus Metals启动Gaspard项目勘探并任命新CEO
2
欧盟22国签署首份储能协议,承诺新增30-35GW
3
中国新疆达坂城抽水蓄能电站正式开工
4
中国新版数据管理能力成熟度评估国家标准实施
5
全球首艘甲醇双燃料水泥船动力系统签约 七一一所提供自主核心技术
6
澳大利亚三星物产提交150MW/600MWh储能EPBC评估
7
西班牙电网公司1500万欧元建成Don Álvaro 400千伏变电站
8
达意隆吹贴灌旋一体设备实现中国市场突破
9
澳大利亚Fortescue与CMB.TECH签署氨燃料船租赁协议,2026年投运
10
韩国2026年人形机器人挑战赛12支队伍7月角逐