

小鹏汽车与北京大学合作研发高效无人驾驶视觉框架
小鹏汽车与北京大学合作,共同研发了一种名为FastDriveVLA的高效无人驾驶视觉框架。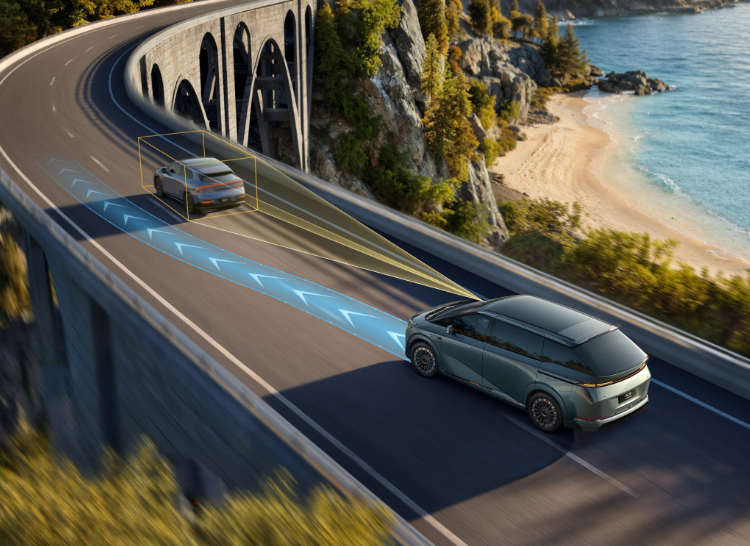
双方的研究团队针对端到端无人驾驶模型中视觉信息处理负荷较大的问题,提出了新的解决方案。该框架的设计灵感源于人类驾驶时专注于关键信息的特性,通过筛选对驾驶决策至关重要的视觉数据并过滤冗余背景,从而降低计算复杂度。
根据相关技术验证,在特定条件下,该框架能在保持系统规划精度的同时,显著减少所需处理的计算量。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
上一篇:陕西眉太高速公路全线通车
最新简讯
相关视频
上万匹狂暴动力撕裂一切物理法则—MTU8000!#发动机 #科普 #机械 #知识分享
00:02:55

煤矿液压支架的专属座驾||框架式支架搬运车,液压支架专属座驾,高强度合金框架稳托重物,液压吊链单人快速装卸,铰接车身转弯灵活,六轮驱动适配狭窄拐弯巷道,防爆柴油、锂电双动力,综采搬家倒面效率直接拉满。神东煤炭 #国家能源集团
00:02:00

破冰船破冰,为啥不是用船头硬撞?#破冰船 #核动力 #重力破冰
00:00:54
动力之王!全球柴油发动机天花板——康明斯!#康明斯 #柴油发动机 #机械 #科普 #涨知识
00:03:01

☆ 征途70载 共赴新纪元☆ 新中国第一辆汽车下线70周年纪念活动隆重举行
00:00:52
相关推荐

俄罗斯石油公司新型旋转导向系统试验缩短钻井24小时
2026-07-29

澳大利亚Supernode电池二期投运
2026-07-29

Neoen签两份容量合同 南澳Goyder电池规模翻倍
2026-07-29

韩国HD现代三湖向马士基交付首艘9.3万方氨运输船
2026-07-29
中国山东青岛200MW/400MWh独立储能项目全容量并网
2026-07-29
印度计划到2033年使五座小型核反应堆投入运行
2026-07-29

西班牙巴利阿里群岛大学2026年完成473.62 kWp光伏安装
2026-07-29

远景能源与Kallista Energy交付法国386 MWh储能项目
2026-07-29

BBVA成为土耳其COP31全球银行合作伙伴
2026-07-29

马斯达尔与黑山EPCG达成400MW抽水蓄能合作
2026-07-29