

中国北京初创公司RoboParty近期开源了其旗舰双足全栈人形机器人Roboto Origin,这款原型在短短120天内完成研发,是全球首款全栈人形机器人。自开源以来,该项目已在GitHub上获得超过1000个星标,并收到近100套套件的预订单。
RoboParty由21岁的黄毅于2025年4月创立,专注于开发开源双足人形机器人,并获得了MPCi、小米和Galbot等投资者的1000万美元支持。公司旨在推动具身AI技术发展,下一代模型计划集成行为基础模型(BMF)。
黄毅的机器人探索始于哈尔滨工业大学时期,他在2023年凭借两栖无人机赢得全国科技竞赛,并在宿舍建造了AlexBot,一台价值2300美元的开源双足机器人。这一早期项目获得傅立叶智能赞助,并引起了波士顿动力创始人马克·雷伯特的关注。出于对行业效率的思考,黄毅提前毕业并创立RoboParty。
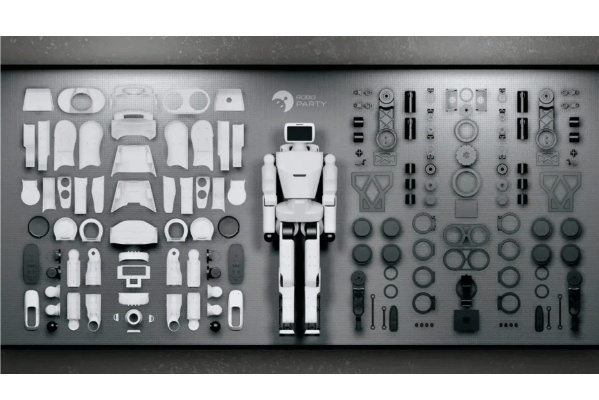
团队在2025年4月至8月间开发出Robot Origin原型,高1.25米、重34公斤,旨在验证端到端人形机器人工作流程。采用解耦并行开发方法,他们快速迭代硬件与软件,测试Sim2Real可行性,展示了小团队的敏捷开发能力。
2026年1月,RoboParty完全开源Roboto Origin,分享硬件设计、软件代码和工程见解,以普及人形机器人技术。开源内容涵盖硬件结构图纸、软件控制代码和工程解决方案,并启动了全球开发者共创计划。Roboto Origin运行速度达3米/秒,采用自主研发的AMP拟人步态算法,确保运动稳定自然。
RoboParty的开源策略针对机器人行业的高成本、设计分散和架构不统一等挑战,通过共享具身基础设施,有望降低人形机器人开发成本达80%。该项目已吸引全球研究人员、工程师和初创团队参与,形成协作网络加速创新。
公司维护全球“人形机器人实践问题列表”,将个人经验转化为集体知识,赋能小团队和独立开发者。未来路线图包括:2026年扩展社区并完善Roboto Origin;2027-2028年推出BMF机器人和组件商业化;2029年后构建通用人形平台,支持大规模具身AI部署。
“人形机器人的终极目标在于开放协作的具身基础设施。我们的目标是让最好的机器人解决方案从这个生态系统中诞生,服务全世界,”黄毅表示。通过开源全栈人形机器人技术,RoboParty正推动全球开发者共同参与,为具身AI领域树立新标准。









