

旋转多材料3D打印技术实现可编程软体机器人制造
2026-02-24 10:24
收藏
哈佛大学研究团队开发了一项名为旋转多材料3D打印的创新技术,该技术利用单个喷嘴同时打印多种材料,实现了可编程软体机器人的高效制造。在实验中,团队使用聚氨酯丝形成机器人外壳,内部通道则由泊洛沙姆制成,这是一种常见于发胶中的聚合物材料。
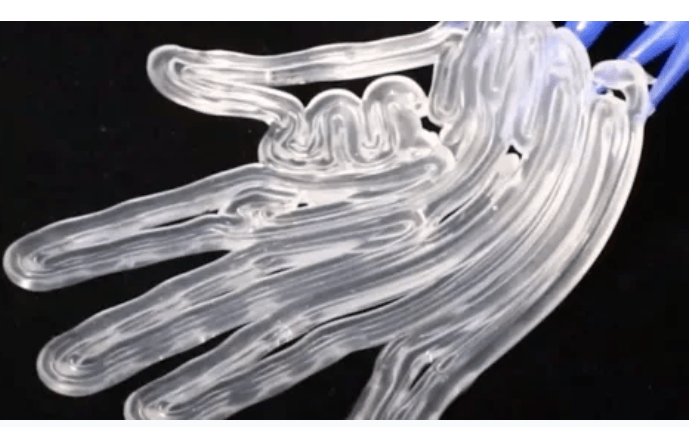
通过对喷嘴运动和材料流动的精确控制,研究人员能够精细编程每个内部通道的方向、形状和大小。外壳固化后,凝胶状的内通道被冲洗掉,留下带有空心通道的管状结构。这些通道可以充气以在不同方向弯曲,使软体机器人能够扩张、收缩和抓取。相关研究成果已发表在《先进材料》杂志上。
“我们使用单个出口的两种材料,可以通过旋转来编程机器人充气时的弯曲方向,”哈佛大学约翰·A·保尔森工程与应用科学学院的研究生Jackson Wilt表示,“我们的目标与创建软性、仿生机器人用于各种应用相一致。”
根据哈佛团队的说法,这项旋转多材料3D打印技术为复杂可控设备的简单制造奠定了基础。它提供了传统软体机器人制造方法的替代方案,传统方法通常涉及将软材料浇铸到模具上,在表面图案化气动通道,并将通道封装到另一层中。
“在这项工作中,我们没有模具,”Wilt说,“我们打印结构,快速编程,并能够快速定制驱动。”
该团队通过螺旋打印一个连续、迷宫般的路径来演示新技术,打印出一个花朵图案,该图案在充气和放气时可以折叠和展开。他们还打印了一个带有可弯曲“指关节”的五指手。据Wilt称,实际应用可能包括手术机器人以及人类辅助设备。这项旋转多材料3D打印技术的推广,有望推动软体机器人领域的进一步发展。
本文来自全球互联网及战略合作伙伴信息的编译与转载,仅为读者提供交流,有侵权或其它问题请及时告知,本站将予以修改或删除,未经正式授权严禁转载本文。邮箱:news@wedoany.com
最新简讯
相关视频




相关推荐
中国强流重离子加速器在广东惠州投入试运行
2026-07-22

维美德将向美国Price公司交付木料处理线
2026-07-22

中国柳工在赞比亚、几内亚及国内批量交付20台装载机等设备
2026-07-22
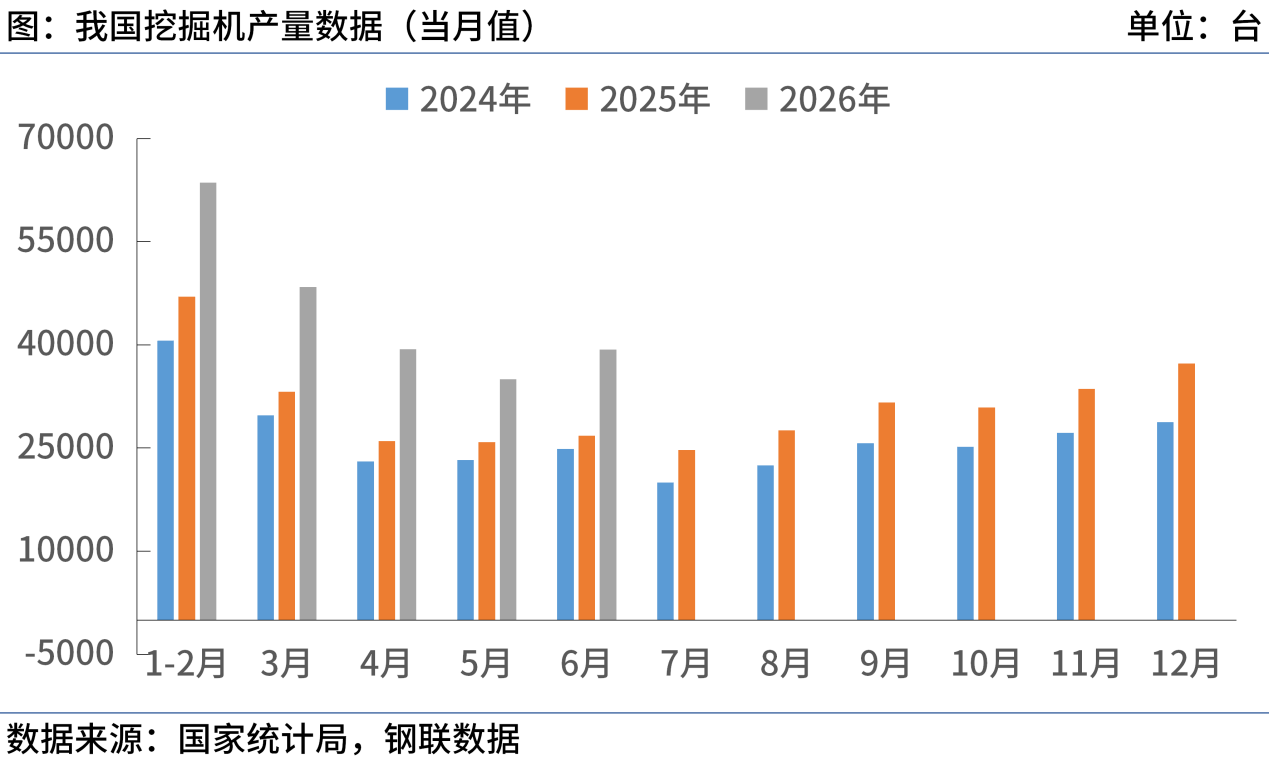
上半年中国挖掘机产量240087台,同比增25.4%
2026-07-21

中国标致全新e-208官图发布,创新采用矩阵方向盘
2026-07-21

瑞典Alimak上半年营收订单双降 税前利润降15%
2026-07-21

中国北京上半年人形机器人产量增近10倍
2026-07-21

德国Promwad开发紧凑型毫米波雷达模块降低工业视频监控误报率
2026-07-21

中国中州铝业与中铝数为联合研发熟料智能识别系统通过验收
2026-07-21

中国三一重工在泰国交付40台电装并获50台新订单
2026-07-21