

诺丁汉大学的一项新研究成果在高端设备制造领域引发关注。该研究发表在《机器人学》杂志上,聚焦于提高工业机器人定位精度并降低其运营成本的方法。
工业机器人内部运动分辨率受集成传感器、控制设备精度以及安装软件等多方面限制,且因其高负荷、特殊设计以及需软件修改以提高精度等特点,难以被轻易取代,这在一定程度上减少了停机时间,降低了生产成本和维护费用。
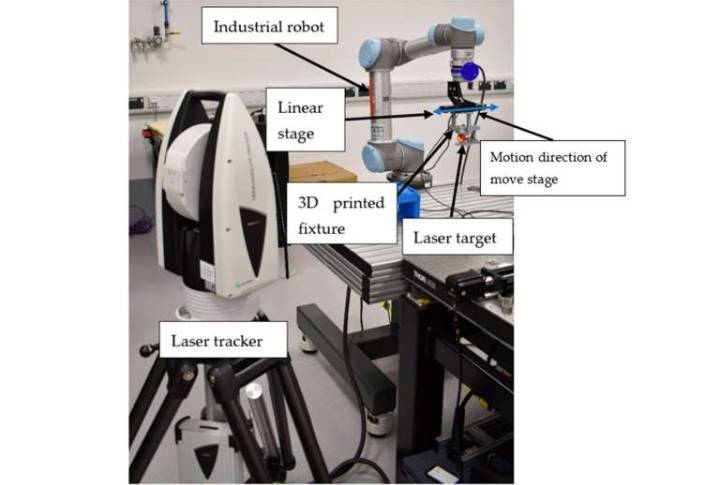
为提升工业机器人运动分辨率,研究团队在工业机器人上增设了一个运动分辨率更高的主动夹爪,使其运动能力超越原设计。同时,在机器人中集成高分辨率关节,并借助激光跟踪技术,为系统末端执行器(机器人与环境交互部分)提供精确的 3D 位置反馈。
实验结果显示,通过使用激光跟踪仪,改进后的工业机器人定位精度显著提升,能有效满足所需操作标准。对 30 次测量中选择点的分析表明,与原工业机器人控制器相比,该方法位置精度提高了 82%。
此外,研究表明激光跟踪仪的应用还可有效延长旧机器人的使用寿命,减少生产错误,降低更换低效旧机器人的成本。
先进制造技术研究小组研究员 Mojtaba Ahmadieh Khanesar 博士表示,本研究成果意义重大,在对工业机器人进行最小改动的情况下,就能使其运动精度超出预期分辨率。受此启发,所提出的方法可广泛应用于拾取和放置、测量应用以及增材制造等多个领域。
更多信息: Mojtaba A. Khanesar 等人,《利用激光跟踪仪提高机械改造工业机器人的定位精度》,《机器人学》(2025)。