

在机器人开发领域,寻找合适的ROS(机器人操作系统)软件包一直是个难题。面对超过7500个选项,传统的关键词搜索往往返回大量不相关结果,浪费开发人员大量时间和精力。近日,国防科技大学和浙江大学的研究人员带来了一项创新成果,为这一难题提供了高效解决方案。
该研究发表于《计算机科学前沿》杂志。研究人员开发的新工具摒弃了简单的词语匹配方式,采用“知识图谱”技术,为每个软件包添加详细信息标签,涵盖其适配的机器人类型、支持的传感器以及功能等,构建起一个精心组织的索引。
在正面测试中,这种语义驱动的搜索方法表现卓越,其准确率比GitHub、Google(仅限ROS或GitHub)、ROS Index甚至ChatGPT等流行方法至少高出21%。首席研究员毛新军教授表示,借助这种语义驱动方法,开发人员能在几秒钟内找到正确的ROS组件,而非以往数小时。
这一更智能的搜索方式对机器人开发意义重大。更快、更准确的搜索使开发人员能将更多时间投入到构建引人注目的机器人上,无论是仓库自动化系统、医疗助理还是交互式博物馆指南。同时,智能搜索工具能提前推荐合适的驱动程序或算法,避免兼容性问题,减少错误、优化测试流程,最终提升机器人性能。
从长远来看,随着越来越多的团队共享和重复使用可靠的开源软件包,整个机器人社区将因此受益,进步更加迅速。对于展望机器人驱动未来(如自动驾驶送货机器人、老年护理伴侣)的资助机构和政策制定者而言,对“语义基础设施”的适度投资将带来巨大回报。
研究团队构建的“ROS包知识图谱”将7500多个包与32000多个详细属性相连。为确保搜索准确性,他们训练专门的语言模型准确解释机器人特定术语,并与现有方法进行正面比较,新方法将正确软件包置于排名靠前结果中的概率至少提高了21%。
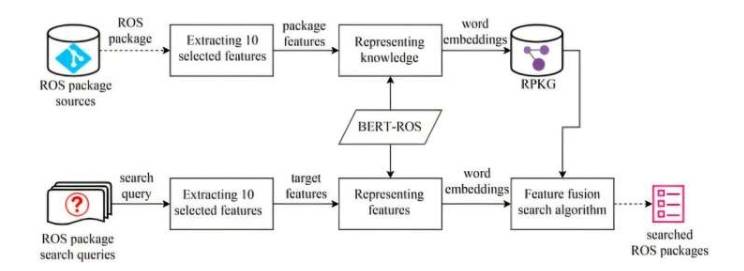
在构建“索引”过程中,研究人员从ROS wiki和GitHub代码库收集信息,结合基于规则和模糊匹配技术提取结构化细节,包括软件包类别、支持的硬件和功能。随后对语言模型进行微调,使其能准确识别“RPLIDAR”或“Gazebo”等术语。最后编写搜索算法,根据与查询共享的匹配标签数量对包进行评分,避免了浏览不相关结果页面的困扰。
随着机器人日益融入日常生活,这种语义搜索引擎将助力开发人员实现无缝、无错误的开发,推动机器人技术迈向新高度。
更多信息: Shuo Wang 等,《机器人软件开发的 ROS 软件包搜索:一种基于知识图谱的方法》,《计算机科学前沿》(2024 年)。