

在高端设备制造领域,机器人虽历经数十年发展,但多数现有机器人在物体操控灵活性与感知能力上仍难以企及人类,这限制了它们在家务、废墟清理、组装维护,尤其是钢厂和铸造厂等高温环境作业中的表现。近日,南加州大学研究人员取得重大突破,开发出MOTIF(基于热、惯性和力传感器的多模态观察)机械手,有望改变这一现状。
研发背景:传统机械手感知局限催生创新
目前,多指机械手普遍缺乏集成感知能力,难以执行复杂任务,如热感知和响应式接触反馈。Daniel Seita、Hanyang Zhou、Wenhao Liu和Haozhe Lou等研究人员表示,现有市售机械灵巧手多侧重机械传动结构,传感需求难以满足研究设想,这促使他们寻求可DIY扩展的硬件平台,以按自身设想设计改进设备。
创新亮点:多传感器集成,功能全面升级
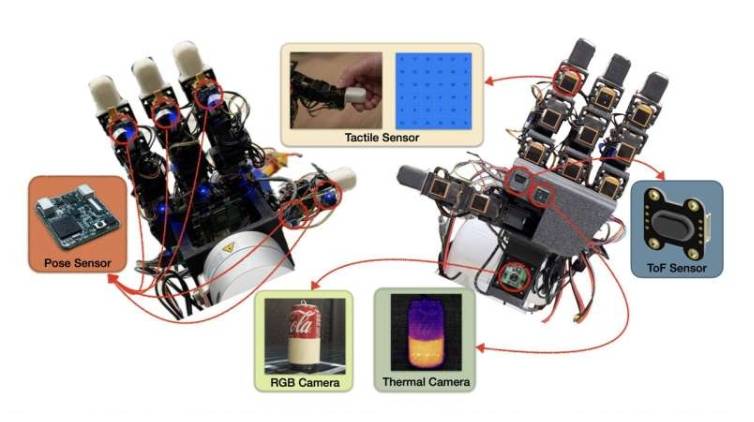
MOTIF机械手是一款先进的灵巧机械手,融合了触觉传感器、深度传感器、热像仪、惯性测量单元(IMU)传感器和视觉传感器等多种传感设备。它扩展了广泛使用的LEAP手设计,具备多方面显著优势:
全面环境感知:可获取丰富的环境信息,为精准操控提供依据。
安全处理高温物体:在高温工作环境中能保障安全操作,避免因高温影响性能和精度。
区分相似物体:能识别外观相似但物理特性不同的物体,提升操控的准确性和适应性。
实验验证:性能优异,潜力初显
为评估MOTIF机械手潜力,研究人员在实验室开展两项实验。其一,评估机械手在考虑物体温度时抓取物体的能力,避免触碰过热区域;其二,操作形状相同但重量不同的物体,通过指尖轻弹动作对物体质量分类。初步测试表明,该机械手表现优异,能安全抓取各类物体并准确预测质量。研究结果显示,热传感与三维重建结合可有效引导安全抓取,惯性传感能精确分类物体质量。
应用前景:多领域适用,未来可期
Seita和他的学生认为,MOTIF机械手在处理家庭环境、专业厨房和工业环境中的手动任务方面前景广阔。在烹饪热菜、焊接或拧紧螺丝等任务中,它可凭借安全处理高温物体和精确操作的能力优于现有系统。
未来规划:持续改进,拓展应用
未来,研究团队计划进一步增强MOTIF机械手功能。一方面,集成更多高分辨率指尖传感器(如Digit 360),提供更精细触觉反馈;另一方面,改进多模态传感算法,探索其在高级手部操作任务及复杂热力相互作用环境等更多复杂现实场景中的应用。
此外,周教授透露,该研究团队上周在圣达菲举行的ISER 2025会议上展示了这项工作,并与众多优秀研究人员交流想法,期望启发学术界探索更多传感模式研究方向。此次MOTIF机械手的研发,为高端设备制造领域带来了新的技术突破和发展方向,有望推动相关行业迈向新高度。
更多信息: Hanyang Zhou 等,《MOTIF 手:基于热、惯性和力传感器进行多模态观测的机械手》,arXiv (2025)。