

在高端设备制造领域,机器人技术正不断突破传统边界。过去,教授机器人新技能依赖编程专业知识,而新一代机器人正朝着“向任何人学习”的方向迈进。如今,麻省理工学院的工程师们在这一领域取得重大进展,开发出一种多功能演示界面(VDI),为机器人学习带来全新变革。
创新突破:三合一训练界面登场
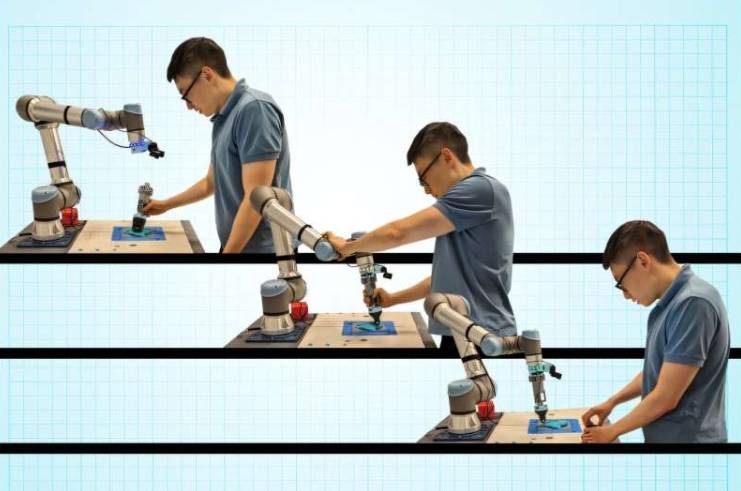
工程师们致力于设计能“从演示中学习”的机器人助手,以往边做边学的机器人多采用远程控制、物理移动机器人或机器人观察模仿这三种演示方法中的一种训练。麻省理工学院团队打破常规,研发出三合一训练界面。该界面是手持式、配备传感器的工具,可连接常见协作机械臂。用户能通过远程控制、物理操作或亲自演示任务来教机器人,根据喜好或任务需求灵活选择训练方式。
测试验证:展现多元优势
研究小组在标准协作机械臂上测试“多功能演示界面”。拥有制造专业知识的志愿者使用该界面执行压装和成型两项工厂车间常见手动任务。压装任务中,用户训练机器人将钉子压入孔中;成型任务里,志愿者训练机器人将橡胶状、面团状物质均匀推到并滚动到中心杆表面。
测试结果显示,新界面提高了训练灵活性,扩展了与机器人互动的用户和“老师”类型,还能让机器人学习更广泛技能。例如,在生产线上,一人可远程训练机器人处理有毒物质,另一人手动操作机器人完成产品装箱,还有人用附件绘制公司徽标供机器人观察学习。
研发初衷:打造高能“队友”
麻省理工学院航空航天系博士后迈克·哈格诺表示,团队致力于打造高智商、高技能的“队友”,与人类有效合作完成复杂工作。他们相信,灵活的演示工具不仅适用于制造车间,还能在家庭或护理环境等其他领域发挥更大作用,推动机器人应用不断增加。Hagenow将于10月在IEEE智能机器人与系统(IROS)会议上发表详细介绍新界面的论文,该论文也已在arXiv预印本服务器上发表。
理论支撑:融合新兴学习策略
沙阿在麻省理工学院的研究小组一直专注于开发让人们在工作中教会机器人新任务或技能的系统,帮助工厂车间工人快速自然调整机器人动作,避免因重新编程软件而停工。团队新研究基于“从演示中学习”(LfD)这一新兴策略,该策略使机器人以更自然、直观的方式训练。
Hagenow和Shah查阅LfD文献发现,其训练方法大致分为远程操作、动觉训练和自然教学三类。对于特定人或任务,一种方法可能更有效。他们因此设想设计结合三种方法的工具,让机器人从更多人身上学习更多任务。
界面设计:功能丰富且灵活
为实现目标,团队设计了全新的多功能演示界面。该界面是手持式附件,可安装在典型协作机械臂上,配备摄像头和标记点用于跟踪工具位置和运动,还有力传感器测量特定任务中施加的压力。
接口连接机器人时,可实现远程控制,摄像头记录动作供机器人自主学习;人类也能通过接口实际操控机器人完成任务。VDI拆卸后,人手握持执行任务,摄像头记录动作,重新连接时机器人可模拟任务。
用户反馈:明确各方法优势
为测试附件可用性,团队将界面与协作机械臂带到当地创新中心,让制造专家测试。研究人员设计实验,要求志愿者用三种训练方法完成两项任务。结果显示,志愿者普遍更喜欢自然方法,但制造业专家也指出,远程操作在训练机器人处理危险或有毒物质方面更优;动觉训练有助于调整搬运重型包裹机器人的定位;自然教学利于演示精细精确操作任务。
未来展望:持续改进拓展应用
Hagenow设想在灵活制造环境中使用该演示界面,让一个机器人协助完成一系列受益于特定类型演示的任务。他计划根据用户反馈改进附件设计,并用新设计测试机器人学习能力。团队认为,通过扩展最终用户在教学过程中与机器人互动方式的界面,可实现协作机器人的更大灵活性。这一创新成果有望为高端设备制造领域带来新的发展机遇,推动机器人技术在更多场景的广泛应用。
更多信息: Michael Hagenow 等,《多功能演示界面:迈向更灵活的机器人演示集合》,arXiv (2024)。