

当前,给机器人分配特定工作,如在工厂里将罐子放置于传送带上,它们能够高效完成。然而,在结构化程度较低的环境中,面对繁多任务,哪怕是拧开灯泡、转动门把手这类看似简单的动作,机器人处理起来都极为棘手。
这一难题在很大程度上与机器人所使用的“腕部”机制密切相关。通常情况下,用于操控物体的机器人配备一个夹持器和一个具有三个自由度(即“滚动”(前后旋转)、“俯仰”(左右)、“偏航”(垂直)三种独立移动方式)的腕部。但传统腕部机械结构复杂且笨重,距离被抓物体较远,机器人完成任务时需移动整个手臂,导致腕部动作笨拙、效率低下,还占用大量空间。
不过,耶鲁大学的研究人员带来了创新突破。他们的研究成果发表于《自然机器智能》杂志,研发出一种更简单的方法,助力机器人处理复杂动作。
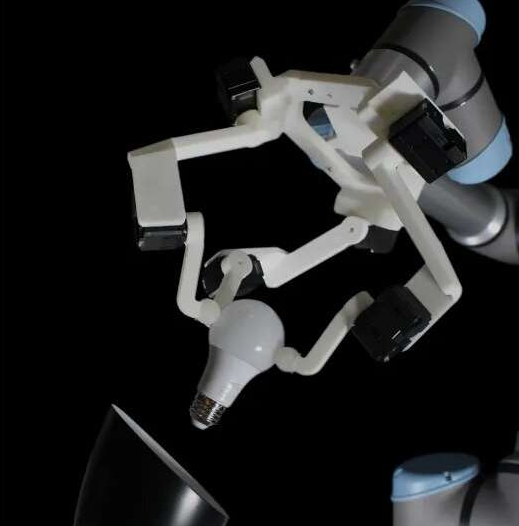
由耶鲁大学亚伦·多拉尔教授实验室研发的机械手被命名为“Sphinx”。它采用球形机构,具备抓取各种物体并在三个轴上旋转的能力,集传统手腕和夹持器的诸多功能于一身。论文第一作者、Dollar实验室博士生瓦察尔·帕特尔(Vatsal Patel)介绍,“Sphinx”机械手并不复杂,上面没有任何传感器,无需摄像头等设备就能正常工作。凭借球形结构,它总能实现物体的滚动、俯仰和偏航。
“Sphinx”机械手优势显著。它效率更高,占用空间小,手腕能在更靠近物体的位置进行旋转,无需移动整个手臂,工作速度更快、效率更高。这种设计还让机器人更容易在受限空间内执行任务,例如在壁橱内拧紧灯泡。
从更广泛的层面来看,“Sphinx”机械手使机器人领域更接近一个日益普遍的目标——设计出能够在家庭、灾难现场和其他非结构化环境中良好工作的机器人。帕特尔表示,在这些环境中,机器人无法知晓物体的确切位置,需要适应环境和物体,而这正是机器人技术的发展方向,耶鲁大学团队也在努力攻克这一难题。此次“Sphinx”机械手的研发成果,无疑为高端设备制造领域机器人技术的发展注入了新的活力,有望推动机器人应用场景向更广泛的非结构化环境拓展。
更多信息: Vatsal V. Patel 等人,《将抓取和旋转与球形机器人手机制相结合》,《自然机器智能》(2025 年)。